 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriver Activity Classification Using Generalizable Representations from Vision-Language Models
Apr 23, 2024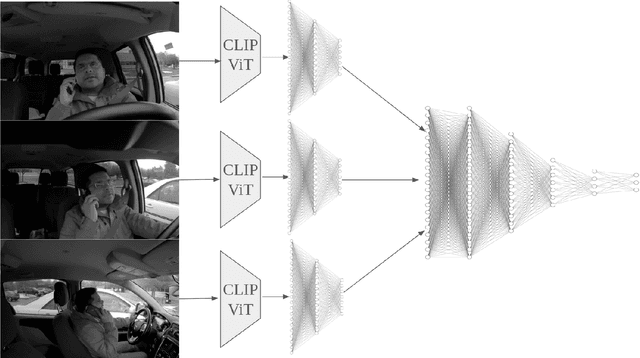
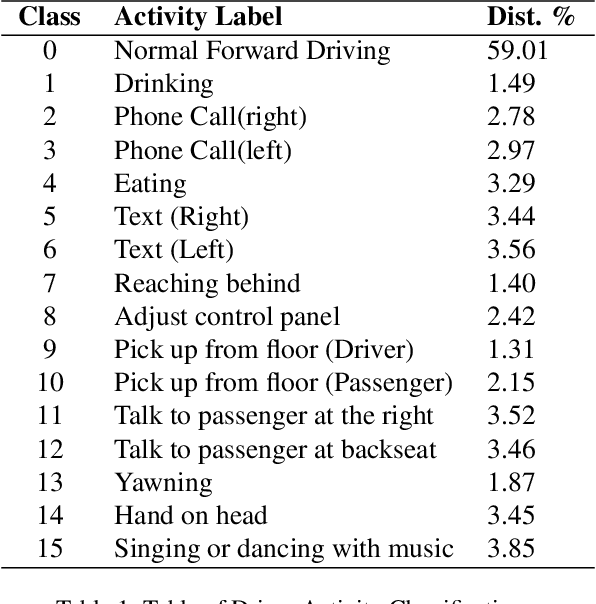
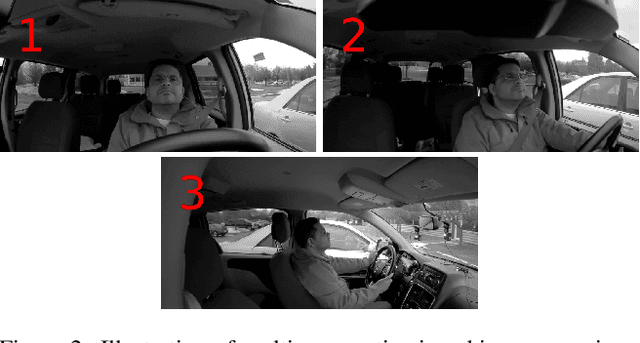
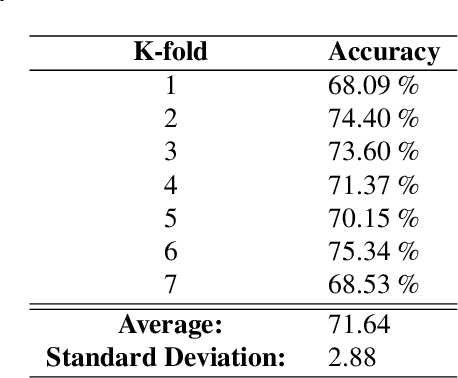
Driver activity classification is crucial for ensuring road safety, with applications ranging from driver assistance systems to autonomous vehicle control transitions. In this paper, we present a novel approach leveraging generalizable representations from vision-language models for driver activity classification. Our method employs a Semantic Representation Late Fusion Neural Network (SRLF-Net) to process synchronized video frames from multiple perspectives. Each frame is encoded using a pretrained vision-language encoder, and the resulting embeddings are fused to generate class probability predictions. By leveraging contrastively-learned vision-language representations, our approach achieves robust performance across diverse driver activities. We evaluate our method on the Naturalistic Driving Action Recognition Dataset, demonstrating strong accuracy across many classes. Our results suggest that vision-language representations offer a promising avenue for driver monitoring systems, providing both accuracy and interpretability through natural language descriptors.
Learning to Find Missing Video Frames with Synthetic Data Augmentation: A General Framework and Application in Generating Thermal Images Using RGB Cameras
Feb 29, 2024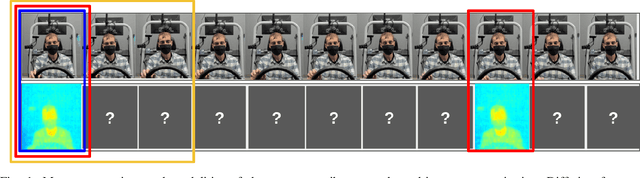
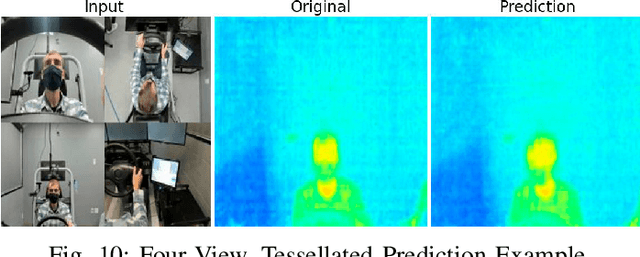
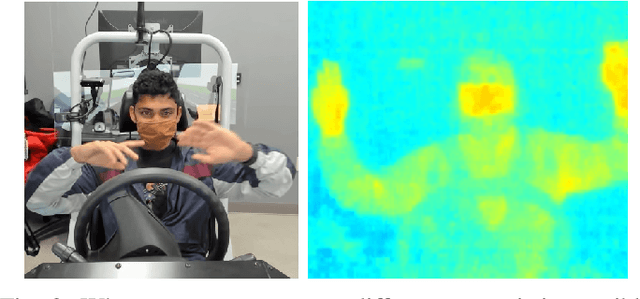
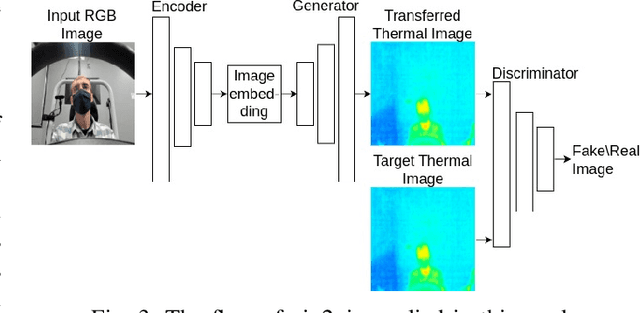
Advanced Driver Assistance Systems (ADAS) in intelligent vehicles rely on accurate driver perception within the vehicle cabin, often leveraging a combination of sensing modalities. However, these modalities operate at varying rates, posing challenges for real-time, comprehensive driver state monitoring. This paper addresses the issue of missing data due to sensor frame rate mismatches, introducing a generative model approach to create synthetic yet realistic thermal imagery. We propose using conditional generative adversarial networks (cGANs), specifically comparing the pix2pix and CycleGAN architectures. Experimental results demonstrate that pix2pix outperforms CycleGAN, and utilizing multi-view input styles, especially stacked views, enhances the accuracy of thermal image generation. Moreover, the study evaluates the model's generalizability across different subjects, revealing the importance of individualized training for optimal performance. The findings suggest the potential of generative models in addressing missing frames, advancing driver state monitoring for intelligent vehicles, and underscoring the need for continued research in model generalization and customization.