 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFully Elman Neural Network: A Novel Deep Recurrent Neural Network Optimized by an Improved Harris Hawks Algorithm for Classification of Pulmonary Arterial Wedge Pressure
Jan 16, 2023



Heart failure (HF) is one of the most prevalent life-threatening cardiovascular diseases in which 6.5 million people are suffering in the USA and more than 23 million worldwide. Mechanical circulatory support of HF patients can be achieved by implanting a left ventricular assist device (LVAD) into HF patients as a bridge to transplant, recovery or destination therapy and can be controlled by measurement of normal and abnormal pulmonary arterial wedge pressure (PAWP). While there are no commercial long-term implantable pressure sensors to measure PAWP, real-time non-invasive estimation of abnormal and normal PAWP becomes vital. In this work, first an improved Harris Hawks optimizer algorithm called HHO+ is presented and tested on 24 unimodal and multimodal benchmark functions. Second, a novel fully Elman neural network (FENN) is proposed to improve the classification performance. Finally, four novel 18-layer deep learning methods of convolutional neural networks (CNNs) with multi-layer perceptron (CNN-MLP), CNN with Elman neural networks (CNN-ENN), CNN with fully Elman neural networks (CNN-FENN), and CNN with fully Elman neural networks optimized by HHO+ algorithm (CNN-FENN-HHO+) for classification of abnormal and normal PAWP using estimated HVAD pump flow were developed and compared. The estimated pump flow was derived by a non-invasive method embedded into the commercial HVAD controller. The proposed methods are evaluated on an imbalanced clinical dataset using 5-fold cross-validation. The proposed CNN-FENN-HHO+ method outperforms the proposed CNN-MLP, CNN-ENN and CNN-FENN methods and improved the classification performance metrics across 5-fold cross-validation. The proposed methods can reduce the likelihood of hazardous events like pulmonary congestion and ventricular suction for HF patients and notify identified abnormal cases to the hospital, clinician and cardiologist.
A Sensorless Control System for an Implantable Heart Pump using a Real-time Deep Convolutional Neural Network
Apr 30, 2021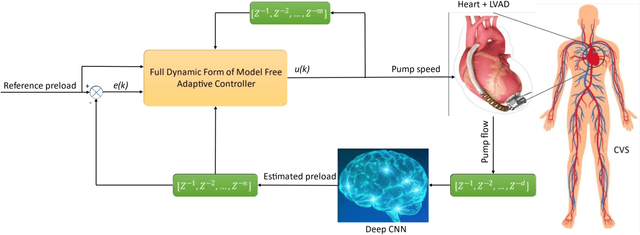


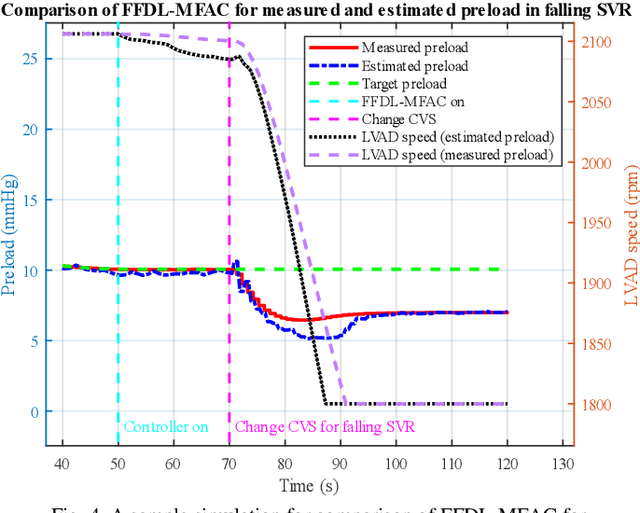
Left ventricular assist devices (LVADs) are mechanical pumps, which can be used to support heart failure (HF) patients as bridge to transplant and destination therapy. To automatically adjust the LVAD speed, a physiological control system needs to be designed to respond to variations of patient hemodynamics across a variety of clinical scenarios. These control systems require pressure feedback signals from the cardiovascular system. However, there are no suitable long-term implantable sensors available. In this study, a novel real-time deep convolutional neural network (CNN) for estimation of preload based on the LVAD flow was proposed. A new sensorless adaptive physiological control system for an LVAD pump was developed using the full dynamic form of model free adaptive control (FFDL-MFAC) and the proposed preload estimator to maintain the patient conditions in safe physiological ranges. The CNN model for preload estimation was trained and evaluated through 10-fold cross validation on 100 different patient conditions and the proposed sensorless control system was assessed on a new testing set of 30 different patient conditions across six different patient scenarios. The proposed preload estimator was extremely accurate with a correlation coefficient of 0.97, root mean squared error of 0.84 mmHg, reproducibility coefficient of 1.56 mmHg, coefficient of variation of 14.44 %, and bias of 0.29 mmHg for the testing dataset. The results also indicate that the proposed sensorless physiological controller works similarly to the preload-based physiological control system for LVAD using measured preload to prevent ventricular suction and pulmonary congestion. This study shows that the LVADs can respond appropriately to changing patient states and physiological demands without the need for additional pressure or flow measurements.
Optimization of dynamic mobile robot path planning based on evolutionary methods
Feb 09, 2019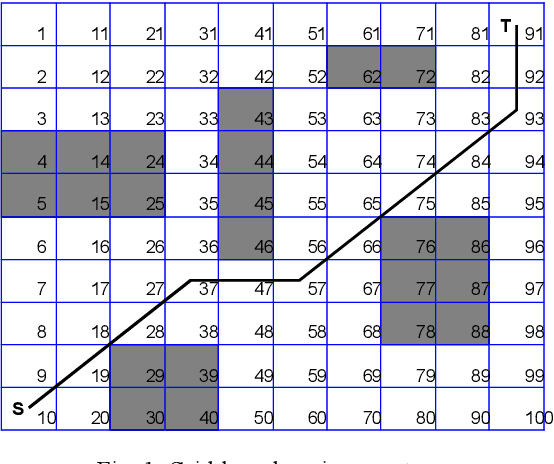
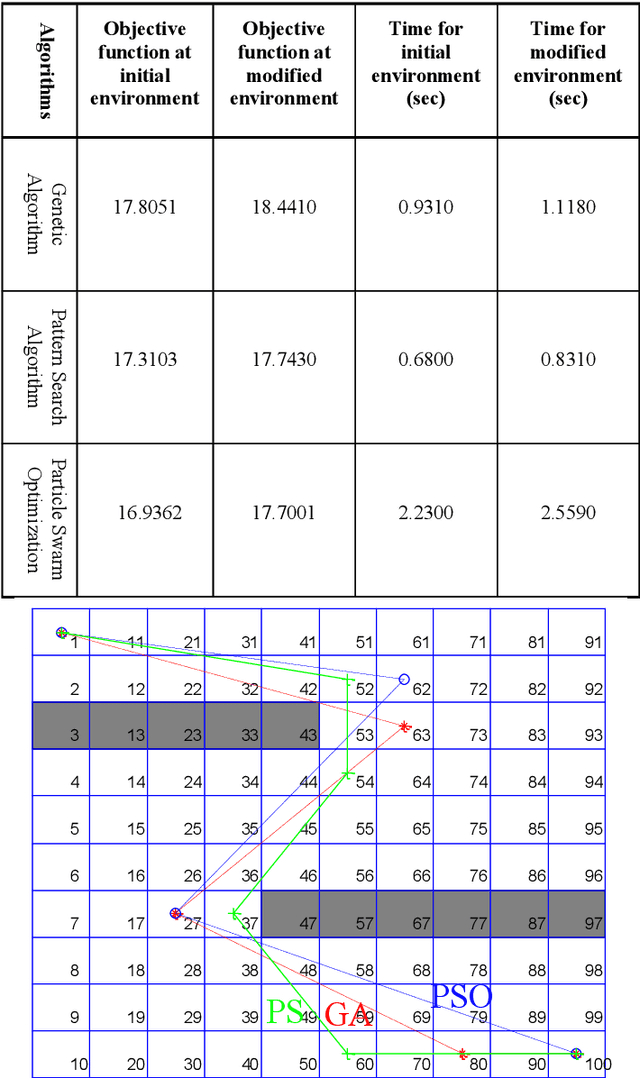
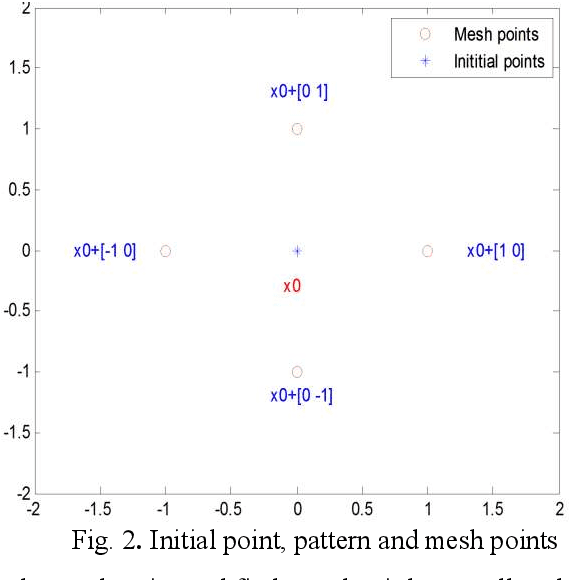
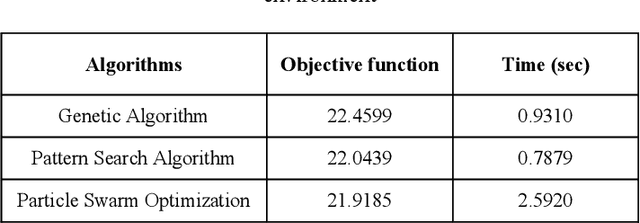
This paper presents evolutionary methods for optimization in dynamic mobile robot path planning. In dynamic mobile path planning, the goal is to find an optimal feasible path from starting point to target point with various obstacles, as well as smoothness and safety in the proposed path. Pattern search (PS) algorithm, Genetic Algorithm (GA) and Particle Swarm Optimization (PSO) are used to find an optimal path for mobile robots to reach to target point with obstacle avoidance. For showing the success of the proposed method, first they are applied to two different paths with a dynamic environment in obstacles. The first results show that the PSO algorithms are converged and minimize the objective function better that the others, while PS has the lower time compared to other algorithms in the initial and modified environment. The second test path is in the z-type environment that we compare the mentioned algorithms on it. Also in this environment, the same result is repeated.