Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariational Inference for On-line Anomaly Detection in High-Dimensional Time Series
Jun 14, 2016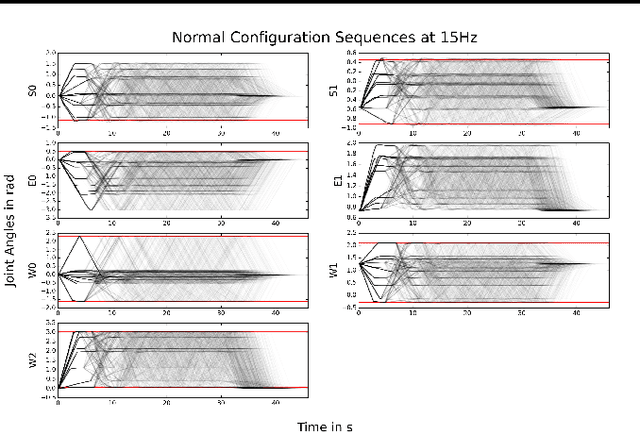



Approximate variational inference has shown to be a powerful tool for modeling unknown complex probability distributions. Recent advances in the field allow us to learn probabilistic models of sequences that actively exploit spatial and temporal structure. We apply a Stochastic Recurrent Network (STORN) to learn robot time series data. Our evaluation demonstrates that we can robustly detect anomalies both off- and on-line.
* Accepted as workshop paper at ICLR 2016; accepted as workshop paper
for anomaly detection workshop at ICML 2016
Via