 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputational Fabrication and Assembly for In Situ Manufacturing
May 21, 2024



Fabrication today relies on disparate, large machines spread across industrial facilities. These are operated by domain experts to construct and assemble artefacts in sequential steps from large numbers of parts. This traditional, centralized mass manufacturing paradigm is characterized by large capital costs and inflexibility to changing needs, complex global supply chains hinged on economic and political stability, and waste and over-manufacturing of uniform artefacts that fail to meet the technical and personal needs of today's diverse individuals and use cases. Today, these challenges are particularly severe at points of need, such as the space environment. The space environment is remote and unpredictable, and the ability to manufacture in situ offers unique opportunities to address new challenges as they arise. However, the challenges faced in space are often mirrored on Earth. In hospitals, disaster zones, low resource environments and laboratories, the ability to manufacture customized artefacts at points of need can significantly enhance our ability to respond rapidly to unforeseen events. In this thesis, I introduce digital fabrication platforms with co-developed hardware and software that draw on tools from robotics and human-computer interaction to automate manufacturing of customized artefacts at the point of need. Highlighting three research themes across fabrication machines, modular assembly, and programmable materials, the thesis will cover a digital fabrication platform for producing functional robots, a modular robotic platform for in-space assembly deployed in microgravity, and a method for programming magnetic material to selectively assemble.
Selective Self-Assembly using Re-Programmable Magnetic Pixels
Aug 07, 2022
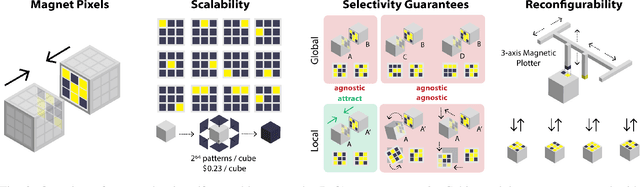

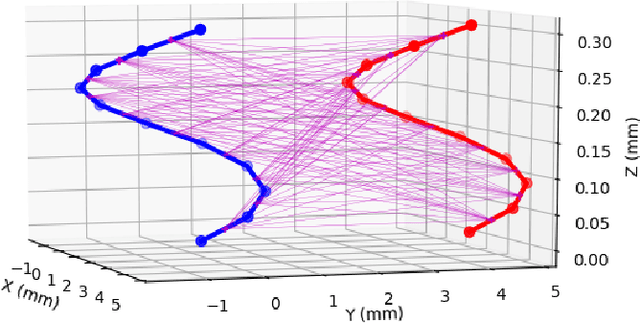
This paper introduces a method to generate highly selective encodings that can be magnetically "programmed" onto physical modules to enable them to self-assemble in chosen configurations. We generate these encodings based on Hadamard matrices, and show how to design the faces of modules to be maximally attractive to their intended mate, while remaining maximally agnostic to other faces. We derive guarantees on these bounds, and verify their attraction and agnosticism experimentally. Using cubic modules whose faces have been covered in soft magnetic material, we show how inexpensive, passive modules with planar faces can be used to selectively self-assemble into target shapes without geometric guides. We show that these modules can be easily re-programmed for new target shapes using a CNC-based magnetic plotter, and demonstrate self-assembly of 8 cubes in a water tank.
ElectroVoxel: Electromagnetically Actuated Pivoting for Scalable Modular Self-Reconfigurable Robots
Jul 12, 2022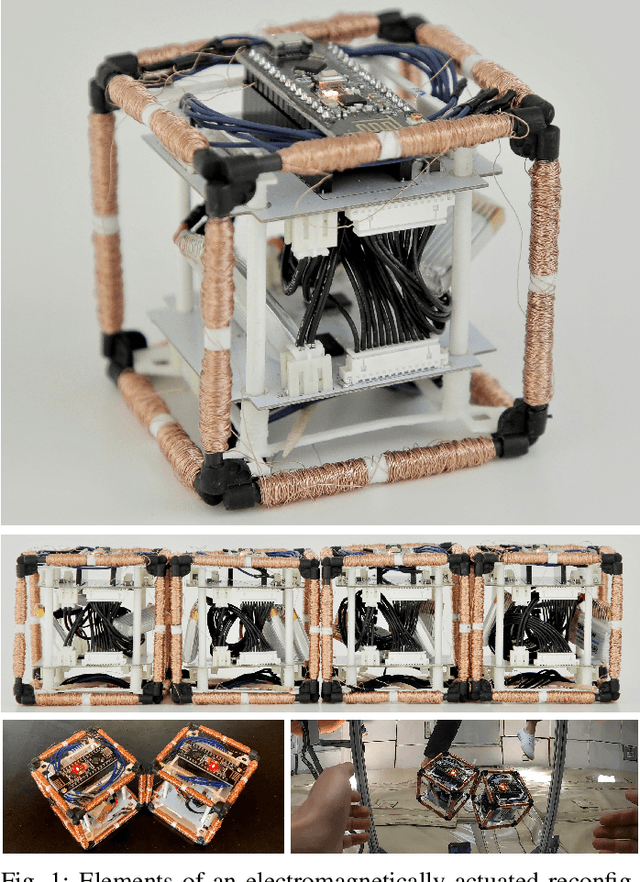

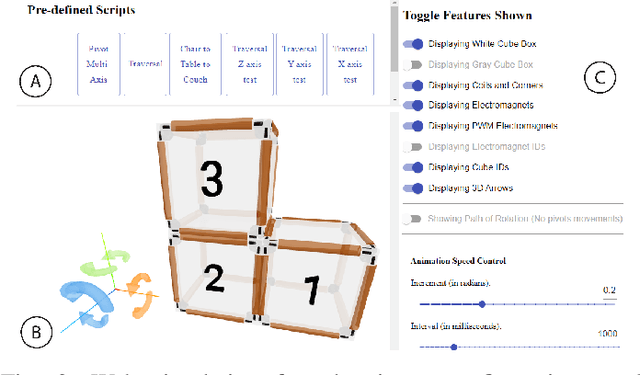
This paper introduces a cube-based reconfigurable robot that utilizes an electromagnet-based actuation framework to reconfigure in three dimensions via pivoting. While a variety of actuation mechanisms for self-reconfigurable robots have been explored, they often suffer from cost, complexity, assembly and sizing requirements that prevent scaled production of such robots. To address this challenge, we use an actuation mechanism based on electromagnets embedded into the edges of each cube to interchangeably create identically or oppositely polarized electromagnet pairs, resulting in repulsive or attractive forces, respectively. By leveraging attraction for hinge formation, and repulsion to drive pivoting maneuvers, we can reconfigure the robot by voxelizing it and actuating its constituent modules - termed Electrovoxels - via electromagnetically actuated pivoting. To demonstrate this, we develop fully untethered, three-dimensional self-reconfigurable robots and demonstrate 2D and 3D self-reconfiguration using pivot and traversal maneuvers on an air-table and in microgravity on a parabolic flight. This paper describes the hardware design of our robots, its pivoting framework, our reconfiguration planning software, and an evaluation of the dynamical and electrical characteristics of our system to inform the design of scalable self-reconfigurable robots.