 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrognoseNet: A Generative Probabilistic Framework for Multimodal Position Prediction given Context Information
Oct 02, 2020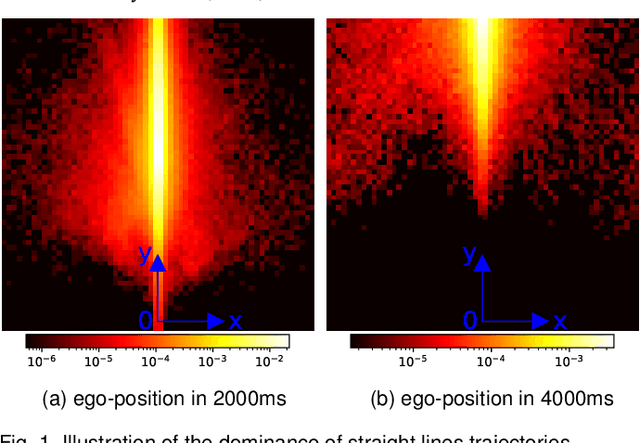


The ability to predict multiple possible future positions of the ego-vehicle given the surrounding context while also estimating their probabilities is key to safe autonomous driving. Most of the current state-of-the-art Deep Learning approaches are trained on trajectory data to achieve this task. However trajectory data captured by sensor systems is highly imbalanced, since by far most of the trajectories follow straight lines with an approximately constant velocity. This poses a huge challenge for the task of predicting future positions, which is inherently a regression problem. Current state-of-the-art approaches alleviate this problem only by major preprocessing of the training data, e.g. resampling, clustering into anchors etc. In this paper we propose an approach which reformulates the prediction problem as a classification task, allowing for powerful tools, e.g. focal loss, to combat the imbalance. To this end we design a generative probabilistic model consisting of a deep neural network with a Mixture of Gaussian head. A smart choice of the latent variable allows for the reformulation of the log-likelihood function as a combination of a classification problem and a much simplified regression problem. The output of our model is an estimate of the probability density function of future positions, hence allowing for prediction of multiple possible positions while also estimating their probabilities. The proposed approach can easily incorporate context information and does not require any preprocessing of the data.