 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClustered Policy Decision Ranking
Nov 21, 2023



Policies trained via reinforcement learning (RL) are often very complex even for simple tasks. In an episode with n time steps, a policy will make n decisions on actions to take, many of which may appear non-intuitive to the observer. Moreover, it is not clear which of these decisions directly contribute towards achieving the reward and how significant their contribution is. Given a trained policy, we propose a black-box method based on statistical covariance estimation that clusters the states of the environment and ranks each cluster according to the importance of decisions made in its states. We compare our measure against a previous statistical fault localization based ranking procedure.
A2D: Anywhere Anytime Drumming
Apr 04, 2023
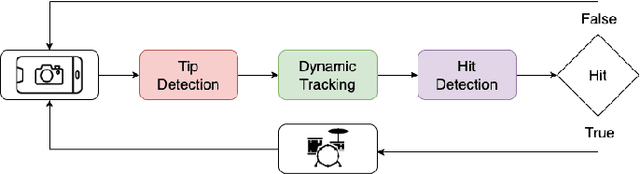
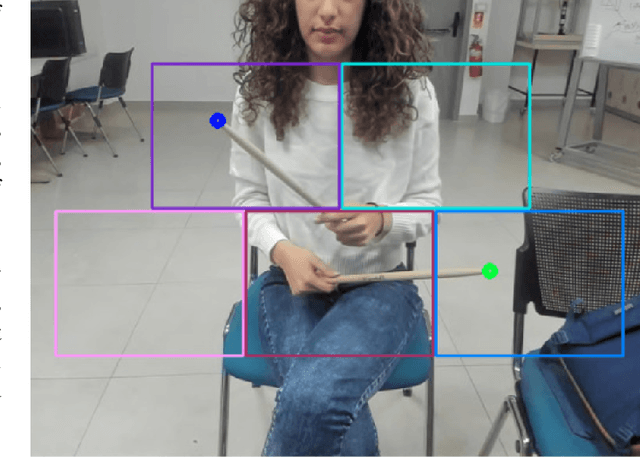
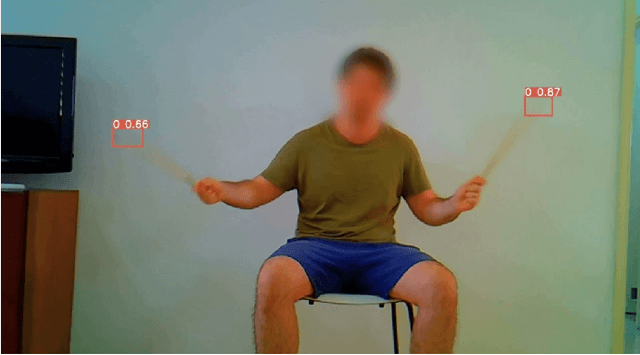
The drum kit, which has only been around for around 100 years, is a popular instrument in many music genres such as pop, rock, and jazz. However, the road to owning a kit is expensive, both financially and space-wise. Also, drums are more difficult to move around compared to other instruments, as they do not fit into a single bag. We propose a no-drums approach that uses only two sticks and a smartphone or a webcam to provide an air-drumming experience. The detection algorithm combines deep learning tools with tracking methods for an enhanced user experience. Based on both quantitative and qualitative testing with humans-in-the-loop, we show that our system has zero misses for beginner level play and negligible misses for advanced level play. Additionally, our limited human trials suggest potential directions for future research.