 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Modeling of Non-Gaussian Aleatoric Uncertainty
May 30, 2024Deep learning offers promising new ways to accurately model aleatoric uncertainty in robotic estimation systems, particularly when the uncertainty distributions do not conform to traditional assumptions of being fixed and Gaussian. In this study, we formulate and evaluate three fundamental deep learning approaches for conditional probability density modeling to quantify non-Gaussian aleatoric uncertainty: parametric, discretized, and generative modeling. We systematically compare the respective strengths and weaknesses of these three methods on simulated non-Gaussian densities as well as on real-world terrain-relative navigation data. Our results show that these deep learning methods can accurately capture complex uncertainty patterns, highlighting their potential for improving the reliability and robustness of estimation systems.
Symmetry Detection in Trajectory Data for More Meaningful Reinforcement Learning Representations
Nov 29, 2022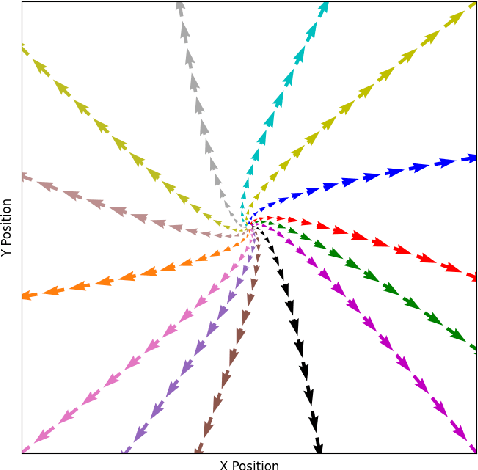
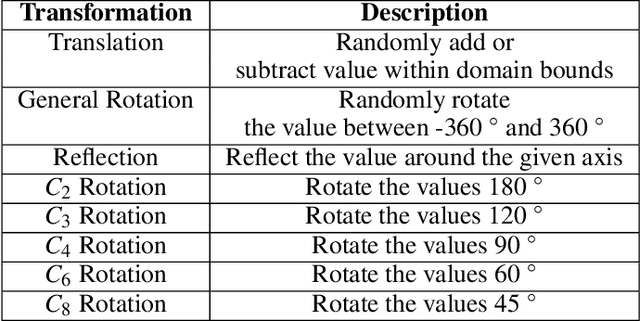
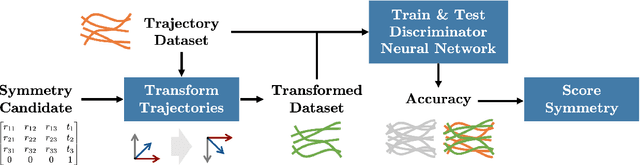
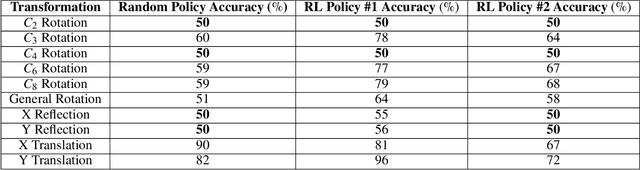
Knowledge of the symmetries of reinforcement learning (RL) systems can be used to create compressed and semantically meaningful representations of a low-level state space. We present a method of automatically detecting RL symmetries directly from raw trajectory data without requiring active control of the system. Our method generates candidate symmetries and trains a recurrent neural network (RNN) to discriminate between the original trajectories and the transformed trajectories for each candidate symmetry. The RNN discriminator's accuracy for each candidate reveals how symmetric the system is under that transformation. This information can be used to create high-level representations that are invariant to all symmetries on a dataset level and to communicate properties of the RL behavior to users. We show in experiments on two simulated RL use cases (a pusher robot and a UAV flying in wind) that our method can determine the symmetries underlying both the environment physics and the trained RL policy.