 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaze estimation learning architecture as support to affective, social and cognitive studies in natural human-robot interaction
Oct 25, 2024



Gaze is a crucial social cue in any interacting scenario and drives many mechanisms of social cognition (joint and shared attention, predicting human intention, coordination tasks). Gaze direction is an indication of social and emotional functions affecting the way the emotions are perceived. Evidence shows that embodied humanoid robots endowing social abilities can be seen as sophisticated stimuli to unravel many mechanisms of human social cognition while increasing engagement and ecological validity. In this context, building a robotic perception system to automatically estimate the human gaze only relying on robot's sensors is still demanding. Main goal of the paper is to propose a learning robotic architecture estimating the human gaze direction in table-top scenarios without any external hardware. Table-top tasks are largely used in many studies in experimental psychology because they are suitable to implement numerous scenarios allowing agents to collaborate while maintaining a face-to-face interaction. Such an architecture can provide a valuable support in studies where external hardware might represent an obstacle to spontaneous human behaviour, especially in environments less controlled than the laboratory (e.g., in clinical settings). A novel dataset was also collected with the humanoid robot iCub, including images annotated from 24 participants in different gaze conditions.
iCub Detecting Gazed Objects: A Pipeline Estimating Human Attention
Aug 25, 2023



This paper explores the role of eye gaze in human-robot interactions and proposes a novel system for detecting objects gazed by the human using solely visual feedback. The system leverages on face detection, human attention prediction, and online object detection, and it allows the robot to perceive and interpret human gaze accurately, paving the way for establishing joint attention with human partners. Additionally, a novel dataset collected with the humanoid robot iCub is introduced, comprising over 22,000 images from ten participants gazing at different annotated objects. This dataset serves as a benchmark for evaluating the performance of the proposed pipeline. The paper also includes an experimental analysis of the pipeline's effectiveness in a human-robot interaction setting, examining the performance of each component. Furthermore, the developed system is deployed on the humanoid robot iCub, and a supplementary video showcases its functionality. The results demonstrate the potential of the proposed approach to enhance social awareness and responsiveness in social robotics, as well as improve assistance and support in collaborative scenarios, promoting efficient human-robot collaboration. The code and the collected dataset will be released upon acceptance.
iCub Being Social: Exploiting Social Cues for Interactive Object Detection Learning
Jul 27, 2022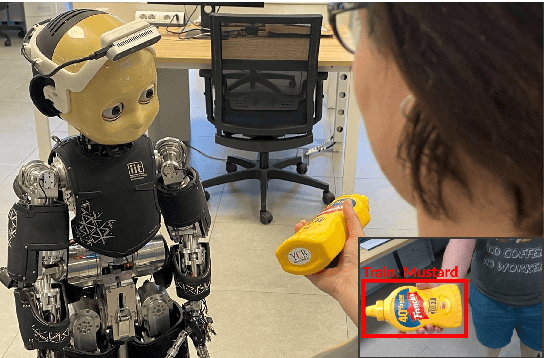
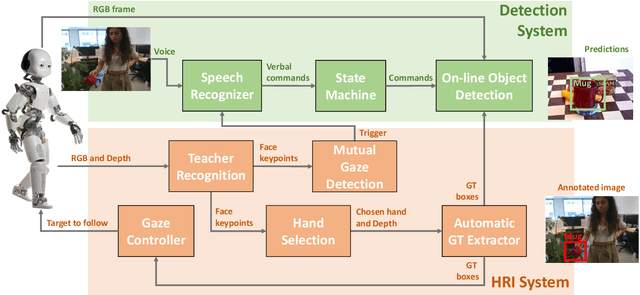
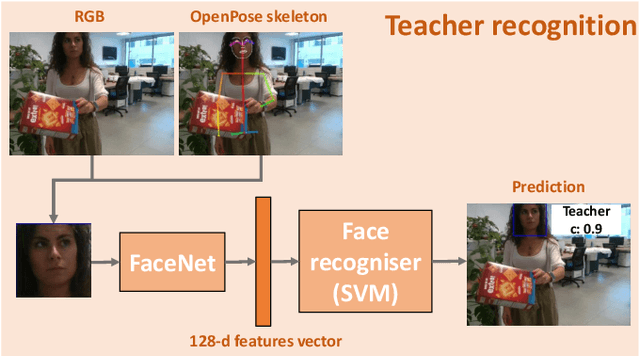
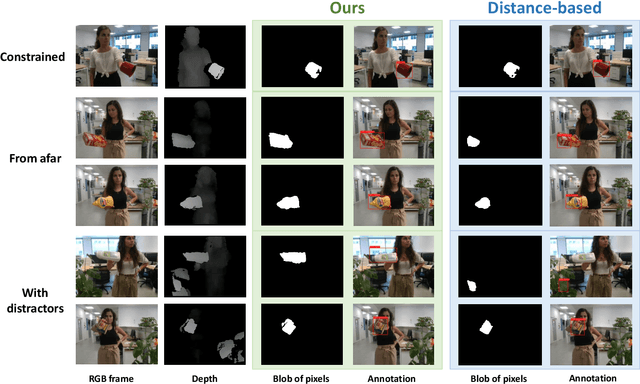
Performing joint interaction requires constant mutual monitoring of own actions and their effects on the other's behaviour. Such an action-effect monitoring is boosted by social cues and might result in an increasing sense of agency. Joint actions and joint attention are strictly correlated and both of them contribute to the formation of a precise temporal coordination. In human-robot interaction, the robot's ability to establish joint attention with a human partner and exploit various social cues to react accordingly is a crucial step in creating communicative robots. Along the social component, an effective human-robot interaction can be seen as a new method to improve and make the robot's learning process more natural and robust for a given task. In this work we use different social skills, such as mutual gaze, gaze following, speech and human face recognition, to develop an effective teacher-learner scenario tailored to visual object learning in dynamic environments. Experiments on the iCub robot demonstrate that the system allows the robot to learn new objects through a natural interaction with a human teacher in presence of distractors.
Deep learning control of artificial avatars in group coordination tasks
Jun 11, 2019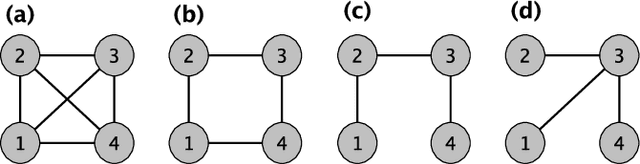
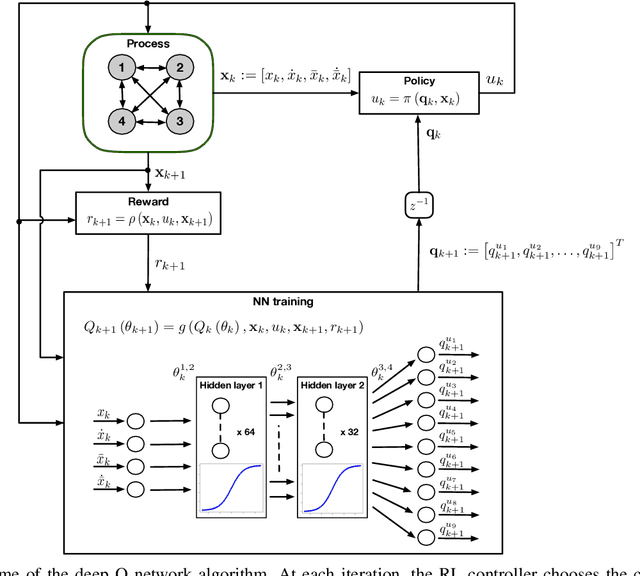
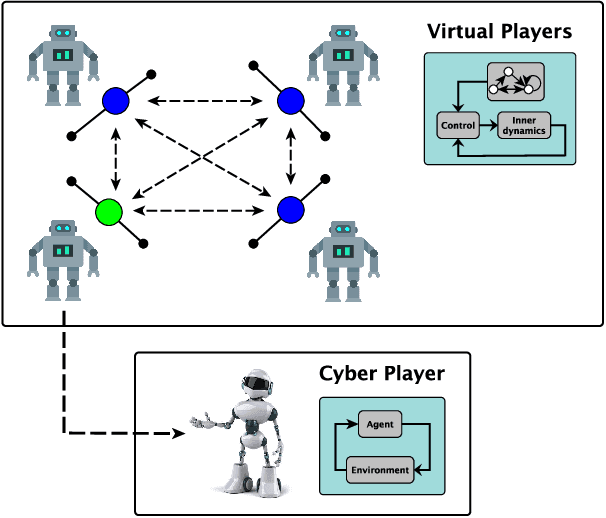
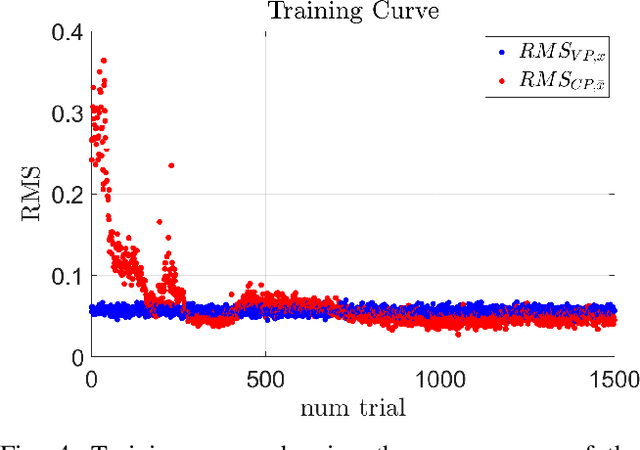
In many joint-action scenarios, humans and robots have to coordinate their movements to accomplish a given shared task. Lifting an object together, sawing a wood log, transferring objects from a point to another are all examples where motor coordination between humans and machines is a crucial requirement. While the dyadic coordination between a human and a robot has been studied in previous investigations, the multi-agent scenario in which a robot has to be integrated into a human group still remains a less explored field of research. In this paper we discuss how to synthesise an artificial agent able to coordinate its motion in human ensembles. Driven by a control architecture based on deep reinforcement learning, such an artificial agent will be able to autonomously move itself in order to synchronise its motion with that of the group while exhibiting human-like kinematic features. As a paradigmatic coordination task we take a group version of the so-called mirror-game which is highlighted as a good benchmark in the human movement literature.