 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLet people fail! Exploring the influence of explainable virtual and robotic agents in learning-by-doing tasks
Nov 15, 2024
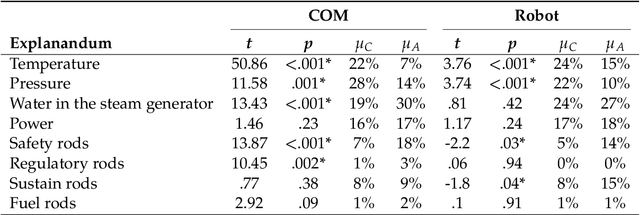
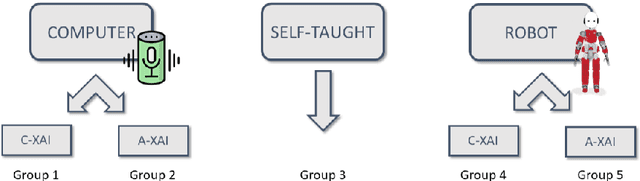
Collaborative decision-making with artificial intelligence (AI) agents presents opportunities and challenges. While human-AI performance often surpasses that of individuals, the impact of such technology on human behavior remains insufficiently understood, primarily when AI agents can provide justifiable explanations for their suggestions. This study compares the effects of classic vs. partner-aware explanations on human behavior and performance during a learning-by-doing task. Three participant groups were involved: one interacting with a computer, another with a humanoid robot, and a third one without assistance. Results indicated that partner-aware explanations influenced participants differently based on the type of artificial agents involved. With the computer, participants enhanced their task completion times. At the same time, those interacting with the humanoid robot were more inclined to follow its suggestions, although they did not reduce their timing. Interestingly, participants autonomously performing the learning-by-doing task demonstrated superior knowledge acquisition than those assisted by explainable AI (XAI). These findings raise profound questions and have significant implications for automated tutoring and human-AI collaboration.
How much informative is your XAI? A decision-making assessment task to objectively measure the goodness of explanations
Dec 07, 2023


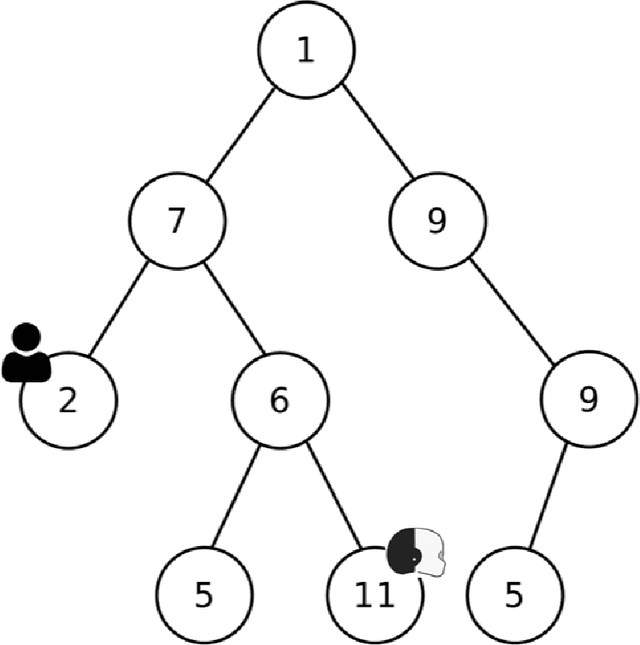
There is an increasing consensus about the effectiveness of user-centred approaches in the explainable artificial intelligence (XAI) field. Indeed, the number and complexity of personalised and user-centred approaches to XAI have rapidly grown in recent years. Often, these works have a two-fold objective: (1) proposing novel XAI techniques able to consider the users and (2) assessing the \textit{goodness} of such techniques with respect to others. From these new works, it emerged that user-centred approaches to XAI positively affect the interaction between users and systems. However, so far, the goodness of XAI systems has been measured through indirect measures, such as performance. In this paper, we propose an assessment task to objectively and quantitatively measure the goodness of XAI systems in terms of their \textit{information power}, which we intended as the amount of information the system provides to the users during the interaction. Moreover, we plan to use our task to objectively compare two XAI techniques in a human-robot decision-making task to understand deeper whether user-centred approaches are more informative than classical ones.
A User-Centred Framework for Explainable Artificial Intelligence in Human-Robot Interaction
Sep 27, 2021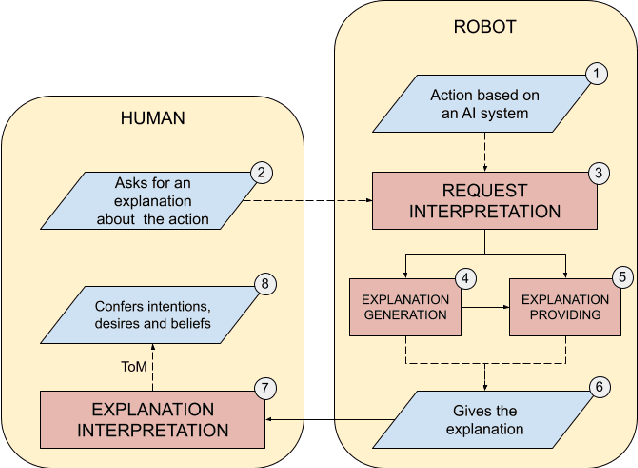
State of the art Artificial Intelligence (AI) techniques have reached an impressive complexity. Consequently, researchers are discovering more and more methods to use them in real-world applications. However, the complexity of such systems requires the introduction of methods that make those transparent to the human user. The AI community is trying to overcome the problem by introducing the Explainable AI (XAI) field, which is tentative to make AI algorithms less opaque. However, in recent years, it became clearer that XAI is much more than a computer science problem: since it is about communication, XAI is also a Human-Agent Interaction problem. Moreover, AI came out of the laboratories to be used in real life. This implies the need for XAI solutions tailored to non-expert users. Hence, we propose a user-centred framework for XAI that focuses on its social-interactive aspect taking inspiration from cognitive and social sciences' theories and findings. The framework aims to provide a structure for interactive XAI solutions thought for non-expert users.
Towards Transparency of TD-RL Robotic Systems with a Human Teacher
May 12, 2020

The high request for autonomous and flexible HRI implies the necessity of deploying Machine Learning (ML) mechanisms in the robot control. Indeed, the use of ML techniques, such as Reinforcement Learning (RL), makes the robot behaviour, during the learning process, not transparent to the observing user. In this work, we proposed an emotional model to improve the transparency in RL tasks for human-robot collaborative scenarios. The architecture we propose supports the RL algorithm with an emotional model able to both receive human feedback and exhibit emotional responses based on the learning process. The model is entirely based on the Temporal Difference (TD) error. The architecture was tested in an isolated laboratory with a simple setup. The results highlight that showing its internal state through an emotional response is enough to make a robot transparent to its human teacher. People also prefer to interact with a responsive robot because they are used to understand their intentions via emotions and social signals.