 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Task Bayesian Optimization for Tuning Decentralized Trajectory Generation in Multi-UAV Systems
Dec 09, 2025



This paper investigates the use of Multi-Task Bayesian Optimization for tuning decentralized trajectory generation algorithms in multi-drone systems. We treat each task as a trajectory generation scenario defined by a specific number of drone-to-drone interactions. To model relationships across scenarios, we employ Multi-Task Gaussian Processes, which capture shared structure across tasks and enable efficient information transfer during optimization. We compare two strategies: optimizing the average mission time across all tasks and optimizing each task individually. Through a comprehensive simulation campaign, we show that single-task optimization leads to progressively shorter mission times as swarm size grows, but requires significantly more optimization time than the average-task approach.
TACOS: Task Agnostic COordinator of a multi-drone System
Oct 02, 2025When a single pilot is responsible for managing a multi-drone system, the task demands varying levels of autonomy, from direct control of individual UAVs, to group-level coordination, to fully autonomous swarm behaviors for accomplishing high-level tasks. Enabling such flexible interaction requires a framework that supports multiple modes of shared autonomy. As language models continue to improve in reasoning and planning, they provide a natural foundation for such systems, reducing pilot workload by enabling high-level task delegation through intuitive, language-based interfaces. In this paper we present TACOS (Task-Agnostic COordinator of a multi-drone System), a unified framework that enables high-level natural language control of multi-UAV systems through Large Language Models (LLMs). TACOS integrates three key capabilities into a single architecture: a one-to-many natural language interface for intuitive user interaction, an intelligent coordinator for translating user intent into structured task plans, and an autonomous agent that executes plans interacting with the real-world. TACOS allows a LLM to interact with a library of executable APIs, bridging semantic reasoning with real-time multi-robot coordination. We demonstrate the system in real-world multi-drone system and conduct an ablation study to assess the contribution of each module.
FAST-Hex -- A Morphing Hexarotor: Design, Mechanical Implementation, Control and Experimental Validation
Apr 14, 2020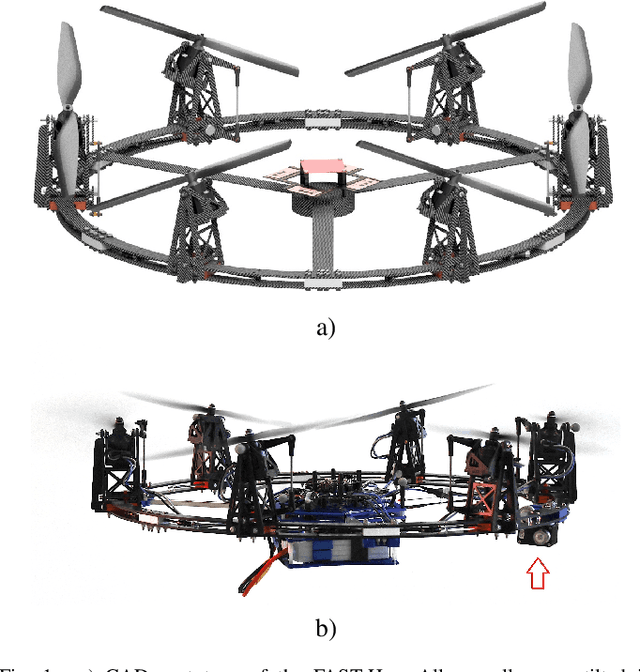
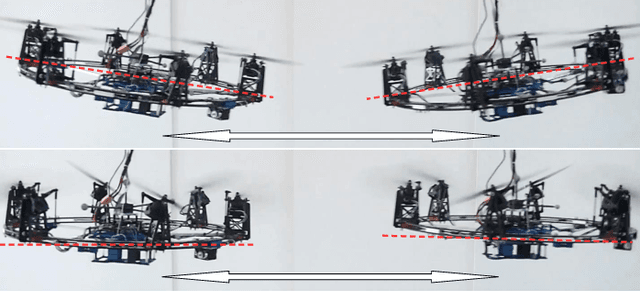
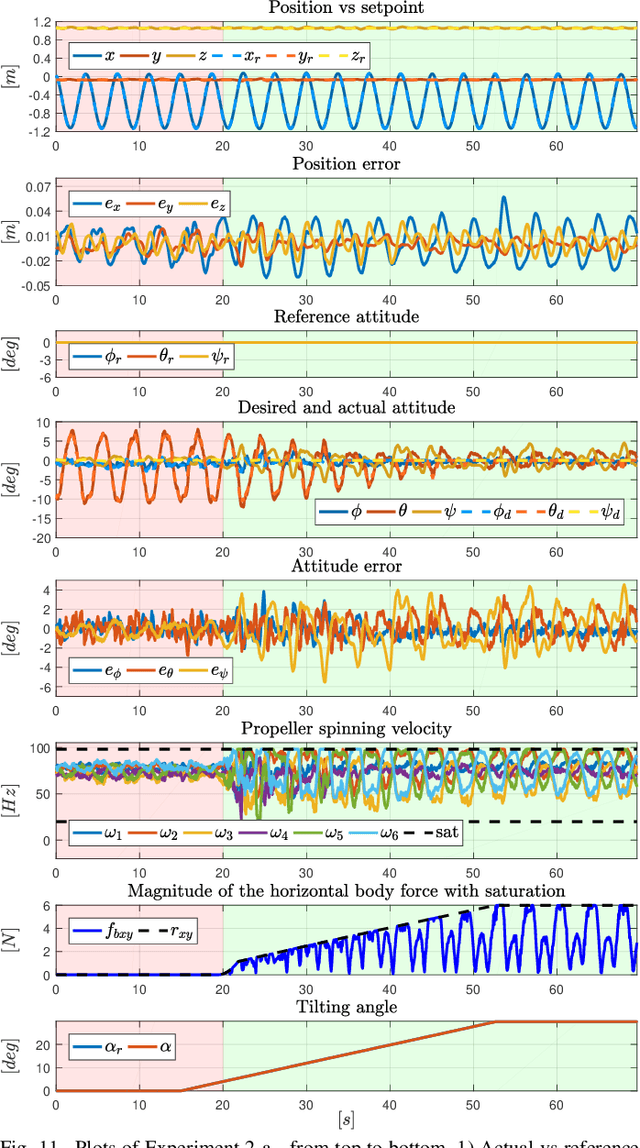
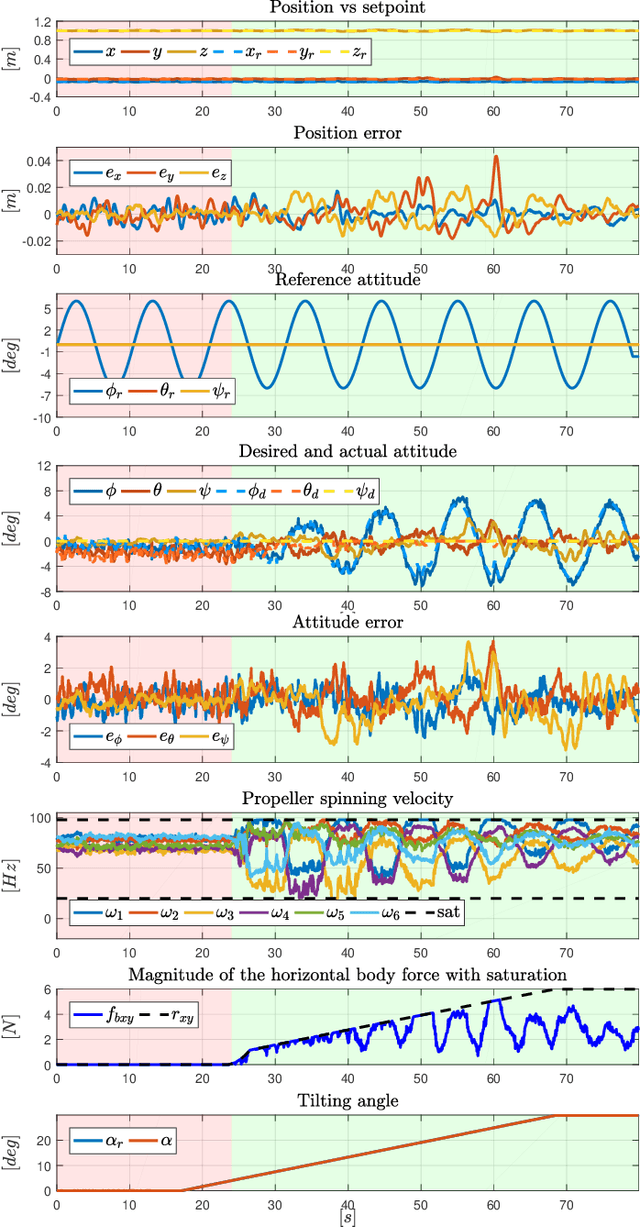
We present FAST-Hex, a micro aerial hexarotor platform that allows to seamlessly transit from an under-actuated to a fully-actuated configuration with only one additional control input, a motor that synchronously tilts all propellers. The FAST-Hex adapts its configuration between the more efficient but under-actuated, collinear multi-rotors and the less efficient, but full-pose-tracking, which is attained by non-collinear multi-rotors. On the basis of prior work on minimal input configurable micro aerial vehicle we mainly stress three aspects: mechanical design, motion control and experimental validation. Specifically, we present the lightweight mechanical structure of the FAST-Hex that allows it to only use one additional input to achieve configurability and full actuation in a vast state space. The motion controller receives as input any reference pose in $\mathbb{R}^3\times \mathrm{SO}(3)$ (3D position + 3D orientation). Full pose tracking is achieved if the reference pose is feasible with respect to actuator constraints. In case of unfeasibility a new feasible desired trajectory is generated online giving priority to the position tracking over the orientation tracking. Finally we present a large set of experimental results shading light on all aspects of the control and pose tracking of FAST-Hex.