 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegressing Transformers for Data-efficient Visual Place Recognition
Jan 29, 2024
Visual place recognition is a critical task in computer vision, especially for localization and navigation systems. Existing methods often rely on contrastive learning: image descriptors are trained to have small distance for similar images and larger distance for dissimilar ones in a latent space. However, this approach struggles to ensure accurate distance-based image similarity representation, particularly when training with binary pairwise labels, and complex re-ranking strategies are required. This work introduces a fresh perspective by framing place recognition as a regression problem, using camera field-of-view overlap as similarity ground truth for learning. By optimizing image descriptors to align directly with graded similarity labels, this approach enhances ranking capabilities without expensive re-ranking, offering data-efficient training and strong generalization across several benchmark datasets.
Generalized Contrastive Optimization of Siamese Networks for Place Recognition
Mar 11, 2021
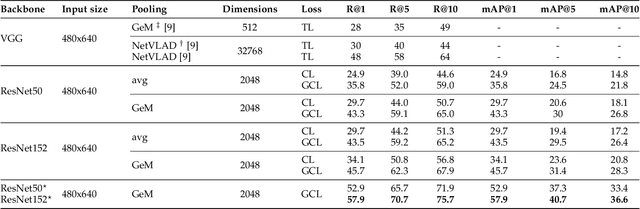
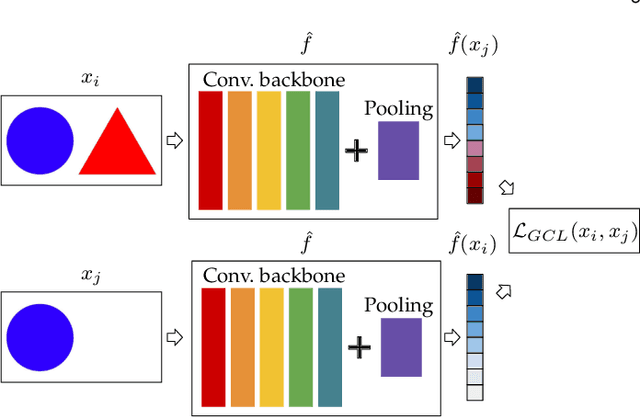
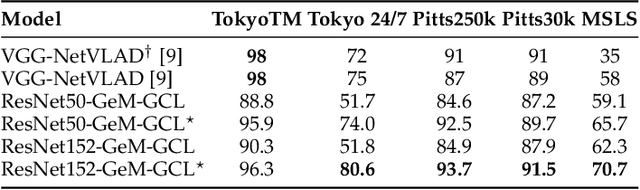
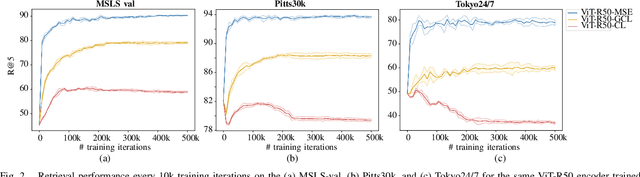
Visual place recognition is a challenging task in computer vision and a key component of camera-based localization and navigation systems. Recently, Convolutional Neural Networks (CNNs) achieved high results and good generalization capabilities. They are usually trained using pairs or triplets of images labeled as either similar or dissimilar, in a binary fashion. In practice, the similarity between two images is not binary, but rather continuous. Furthermore, training these CNNs is computationally complex and involves costly pair and triplet mining strategies. We propose a Generalized Contrastive loss (GCL) function that relies on image similarity as a continuous measure, and use it to train a siamese CNN. Furthermore, we propose three techniques for automatic annotation of image pairs with labels indicating their degree of similarity, and deploy them to re-annotate the MSLS, TB-Places, and 7Scenes datasets. We demonstrate that siamese CNNs trained using the GCL function and the improved annotations consistently outperform their binary counterparts. Our models trained on MSLS outperform the state-of-the-art methods, including NetVLAD, and generalize well on the Pittsburgh, TokyoTM and Tokyo 24/7 datasets. Furthermore, training a siamese network using the GCL function does not require complex pair mining. We release the source code at https://github.com/marialeyvallina/generalized_contrastive_loss.