 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Multi-Agent Actor-Critic with Generative Inference
Oct 07, 2019



Recent multi-agent actor-critic methods have utilized centralized training with decentralized execution to address the non-stationarity of co-adapting agents. This training paradigm constrains learning to the centralized phase such that only pre-learned policies may be used during the decentralized phase, which performs poorly when agent communications are delayed, noisy, or disrupted. In this work, we propose a new system that can gracefully handle partially-observable information due to communication disruptions during decentralized execution. Our approach augments the multi-agent actor-critic method's centralized training phase with generative modeling so that agents may infer other agents' observations when provided with locally available context. Our method is evaluated on three tasks that require agents to combine local and remote observations communicated by other agents. We evaluate our approach by introducing both partial observability during decentralized execution, and show that decentralized training on inferred observations performs as well or better than existing actor-critic methods.
Integer Factorization with a Neuromorphic Sieve
Apr 23, 2018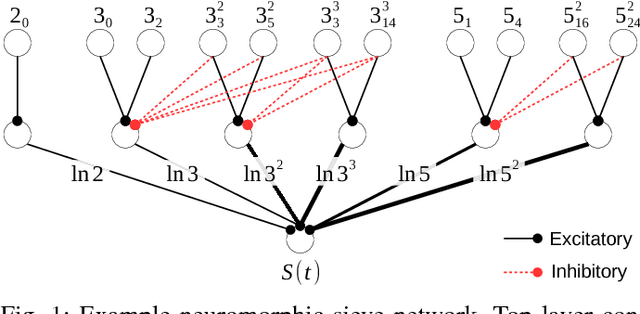

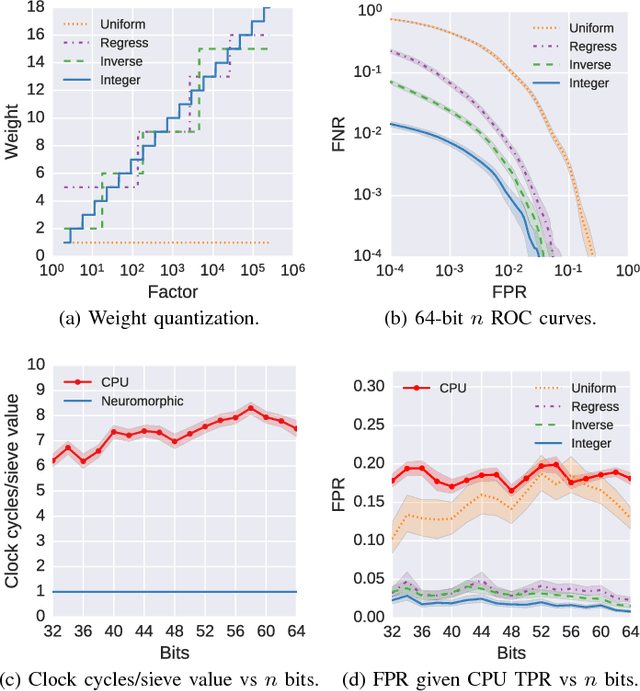
The bound to factor large integers is dominated by the computational effort to discover numbers that are smooth, typically performed by sieving a polynomial sequence. On a von Neumann architecture, sieving has log-log amortized time complexity to check each value for smoothness. This work presents a neuromorphic sieve that achieves a constant time check for smoothness by exploiting two characteristic properties of neuromorphic architectures: constant time synaptic integration and massively parallel computation. The approach is validated by modifying msieve, one of the fastest publicly available integer factorization implementations, to use the IBM Neurosynaptic System (NS1e) as a coprocessor for the sieving stage.
* Fixed typos in equation for modular roots (Section II, par. 6; Section III, par. 2) and phase calculation (Section IV, par 2)