 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA novel approach for modelling and classifying sit-to-stand kinematics using inertial sensors
Jul 14, 2021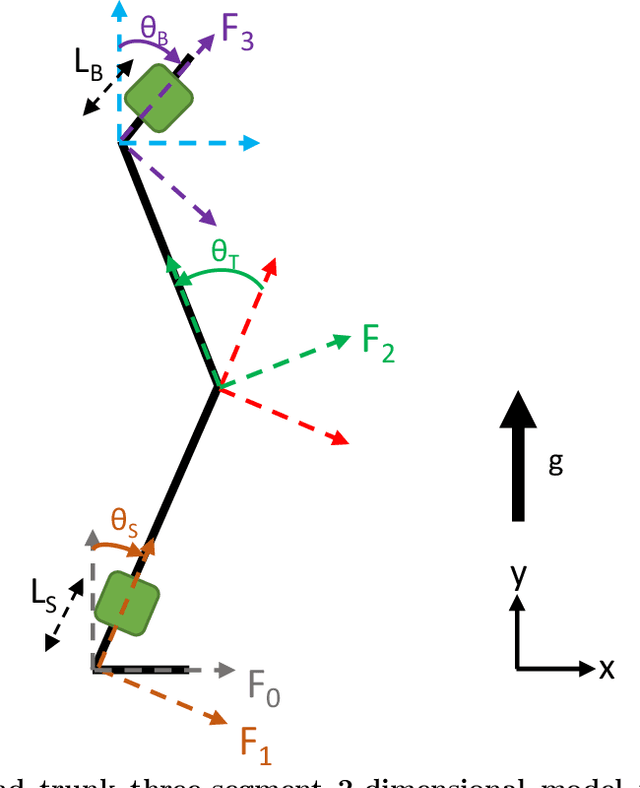
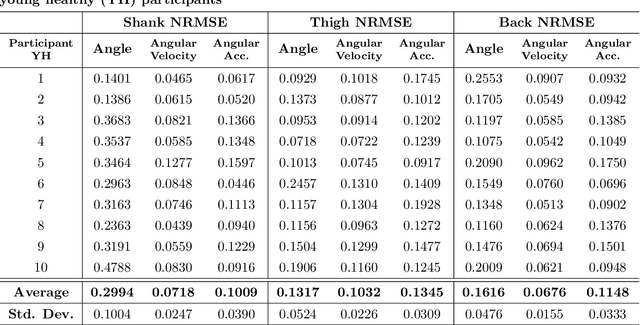
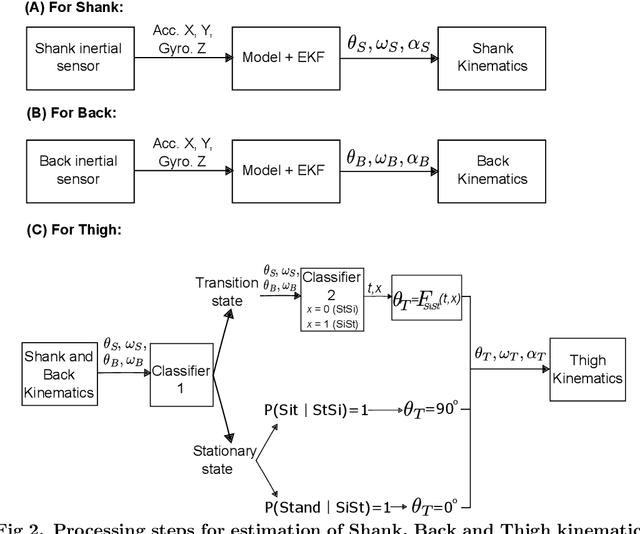

Sit-to-stand transitions are an important part of activities of daily living and play a key role in functional mobility in humans. The sit-to-stand movement is often affected in older adults due to frailty and in patients with motor impairments such as Parkinson's disease leading to falls. Studying kinematics of sit-to-stand transitions can provide insight in assessment, monitoring and developing rehabilitation strategies for the affected populations. We propose a three-segment body model for estimating sit-to-stand kinematics using only two wearable inertial sensors, placed on the shank and back. Reducing the number of sensors to two instead of one per body segment facilitates monitoring and classifying movements over extended periods, making it more comfortable to wear while reducing the power requirements of sensors. We applied this model on 10 younger healthy adults (YH), 12 older healthy adults (OH) and 12 people with Parkinson's disease (PwP). We have achieved this by incorporating unique sit-to-stand classification technique using unsupervised learning in the model based reconstruction of angular kinematics using extended Kalman filter. Our proposed model showed that it was possible to successfully estimate thigh kinematics despite not measuring the thigh motion with inertial sensor. We classified sit-to-stand transitions, sitting and standing states with the accuracies of 98.67%, 94.20% and 91.41% for YH, OH and PwP respectively. We have proposed a novel integrated approach of modelling and classification for estimating the body kinematics during sit-to-stand motion and successfully applied it on YH, OH and PwP groups.
An attention model to analyse the risk of agitation and urinary tract infections in people with dementia
Jan 18, 2021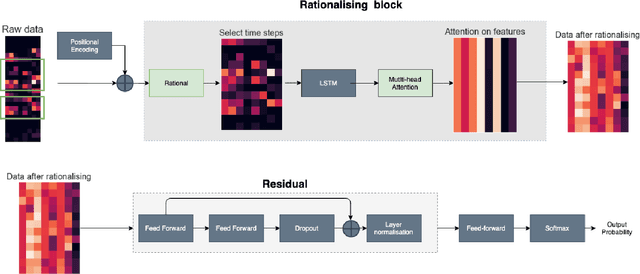
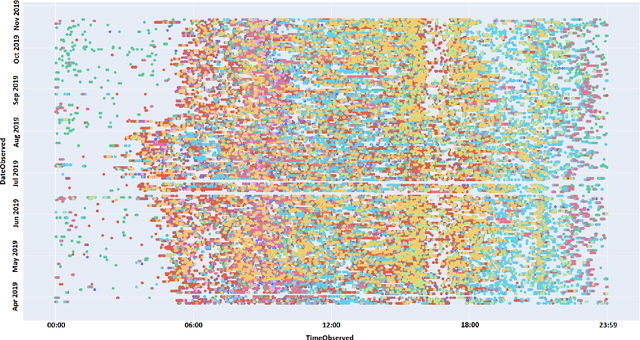
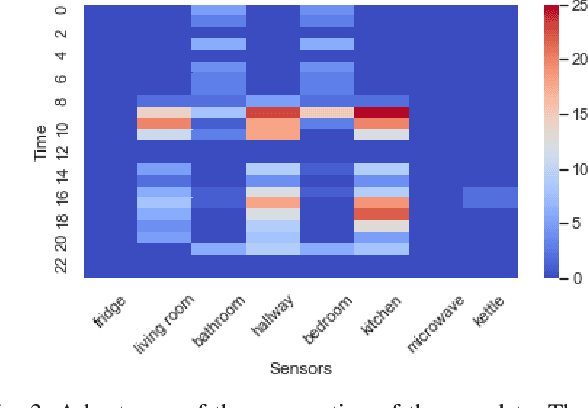
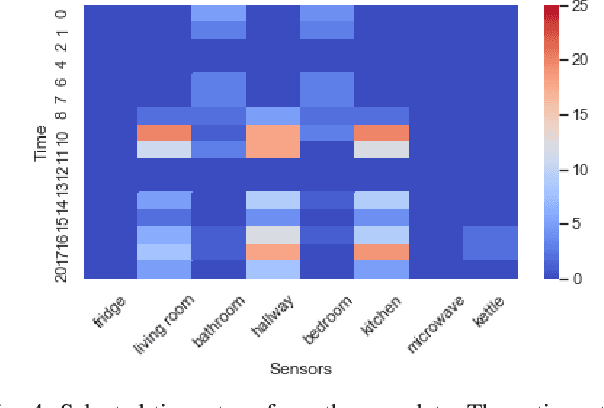
Behavioural symptoms and urinary tract infections (UTI) are among the most common problems faced by people with dementia. One of the key challenges in the management of these conditions is early detection and timely intervention in order to reduce distress and avoid unplanned hospital admissions. Using in-home sensing technologies and machine learning models for sensor data integration and analysis provides opportunities to detect and predict clinically significant events and changes in health status. We have developed an integrated platform to collect in-home sensor data and performed an observational study to apply machine learning models for agitation and UTI risk analysis. We collected a large dataset from 88 participants with a mean age of 82 and a standard deviation of 6.5 (47 females and 41 males) to evaluate a new deep learning model that utilises attention and rational mechanism. The proposed solution can process a large volume of data over a period of time and extract significant patterns in a time-series data (i.e. attention) and use the extracted features and patterns to train risk analysis models (i.e. rational). The proposed model can explain the predictions by indicating which time-steps and features are used in a long series of time-series data. The model provides a recall of 91\% and precision of 83\% in detecting the risk of agitation and UTIs. This model can be used for early detection of conditions such as UTIs and managing of neuropsychiatric symptoms such as agitation in association with initial treatment and early intervention approaches. In our study we have developed a set of clinical pathways for early interventions using the alerts generated by the proposed model and a clinical monitoring team has been set up to use the platform and respond to the alerts according to the created intervention plans.
Emotive Response to a Hybrid-Face Robot and Translation to Consumer Social Robots
Dec 08, 2020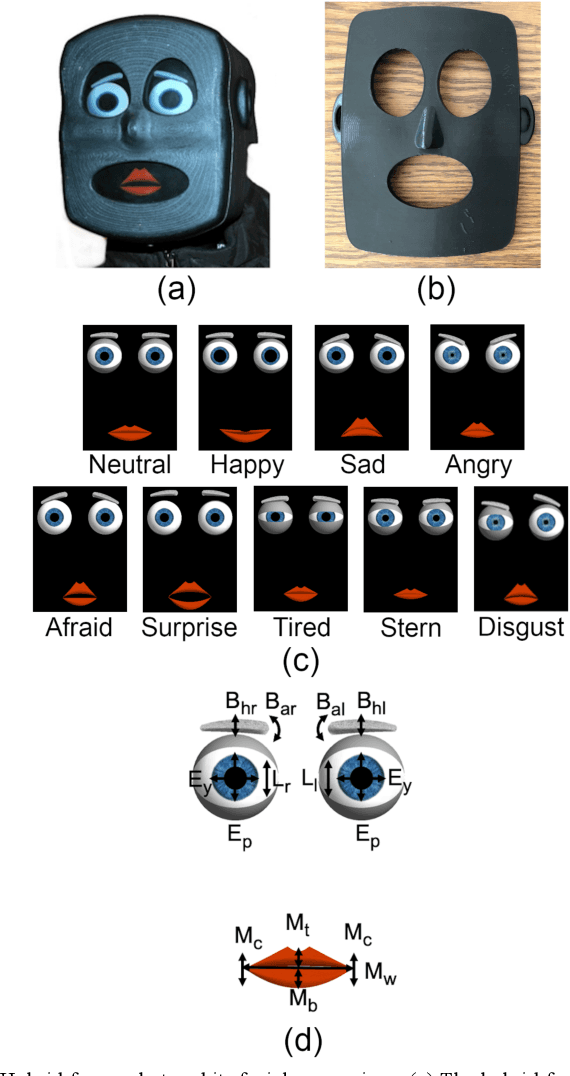
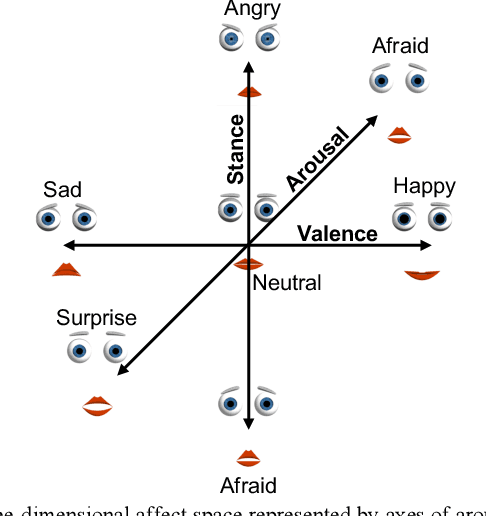
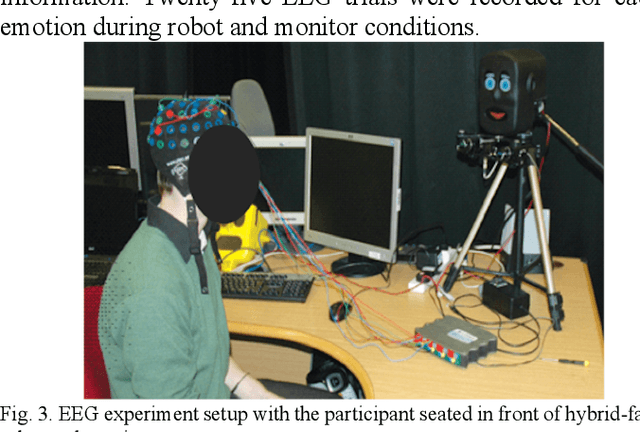
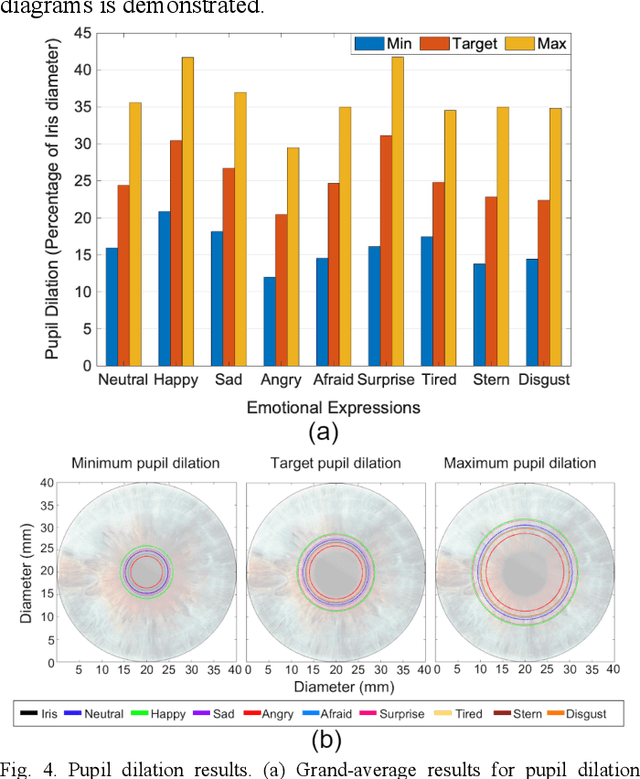
We introduce the conceptual formulation, design, fabrication, control and commercial translation with IoT connection of a hybrid-face social robot and validation of human emotional response to its affective interactions. The hybrid-face robot integrates a 3D printed faceplate and a digital display to simplify conveyance of complex facial movements while providing the impression of three-dimensional depth for natural interaction. We map the space of potential emotions of the robot to specific facial feature parameters and characterise the recognisability of the humanoid hybrid-face robot's archetypal facial expressions. We introduce pupil dilation as an additional degree of freedom for conveyance of emotive states. Human interaction experiments demonstrate the ability to effectively convey emotion from the hybrid-robot face to human observers by mapping their neurophysiological electroencephalography (EEG) response to perceived emotional information and through interviews. Results show main hybrid-face robotic expressions can be discriminated with recognition rates above 80% and invoke human emotive response similar to that of actual human faces as measured by the face-specific N170 event-related potentials in EEG. The hybrid-face robot concept has been modified, implemented, and released in the commercial IoT robotic platform Miko (My Companion), an affective robot with facial and conversational features currently in use for human-robot interaction in children by Emotix Inc. We demonstrate that human EEG responses to Miko emotions are comparative to neurophysiological responses for actual human facial recognition. Finally, interviews show above 90% expression recognition rates in our commercial robot. We conclude that simplified hybrid-face abstraction conveys emotions effectively and enhances human-robot interaction.