 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompressed Sensing Using Binary Matrices of Nearly Optimal Dimensions
Sep 27, 2018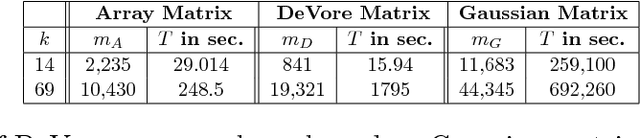
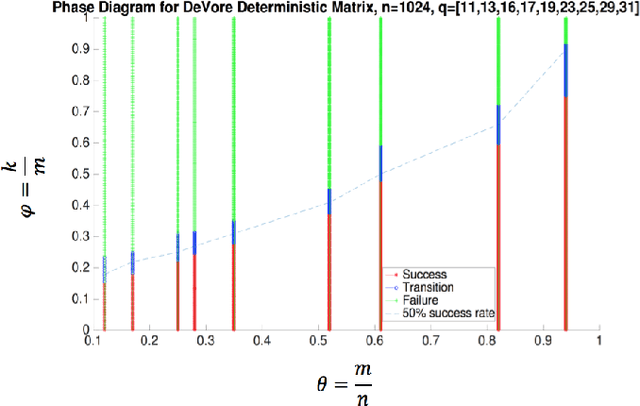
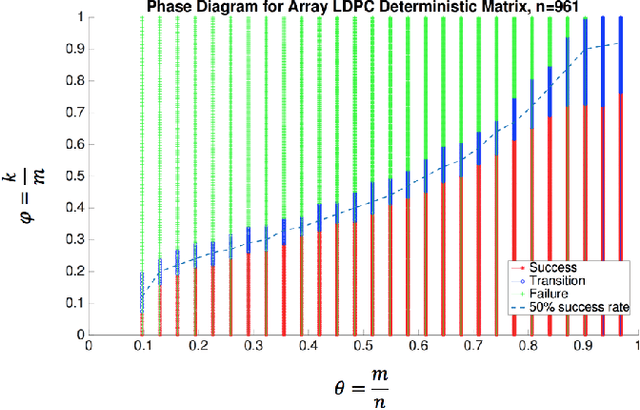
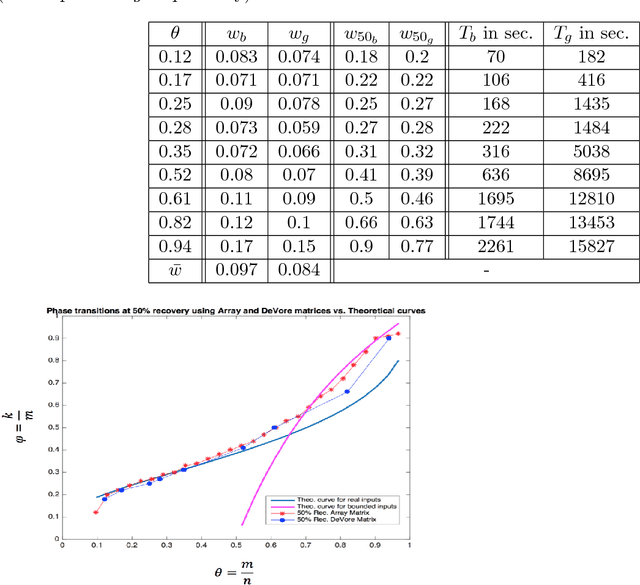
In this paper, we study the problem of compressed sensing using binary measurement matrices, and $\ell_1$-norm minimization (basis pursuit) as the recovery algorithm. We derive new upper and lower bounds on the number of measurements to achieve robust sparse recovery with binary matrices. We establish sufficient conditions for a column-regular binary matrix to satisfy the robust null space property (RNSP), and show that the sparsity bounds for robust sparse recovery obtained using the RNSP are better by a factor of $(3 \sqrt{3})/2 \approx 2.6$ compared to the restricted isometry property (RIP). Next we derive universal \textit{lower} bounds on the number of measurements that any binary matrix needs to have in order to satisfy the weaker sufficient condition based on the RNSP, and show that bipartite graphs of girth six are optimal. Then we display two classes of binary matrices, namely parity check matrices of array codes, and Euler squares, that have girth six and are nearly optimal in the sense of almost satisfying the lower bound. In principle randomly generated Gaussian measurement matrices are `order-optimal.' So we compare the phase transition behavior of the basis pursuit formulation using binary array code and Gaussian matrices, and show that (i) there is essentially no difference between the phase transition boundaries in the two cases, and (ii) the CPU time of basis pursuit with binary matrices is hundreds of times faster than with Gaussian matrices, and the storage requirements are less. Therefore it is suggested that binary matrices are a viable alternative to Gaussian matrices for compressed sensing using basis pursuit.
A Fast Noniterative Algorithm for Compressive Sensing Using Binary Measurement Matrices
May 21, 2018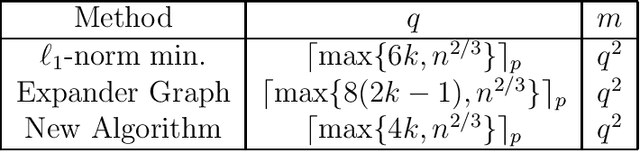
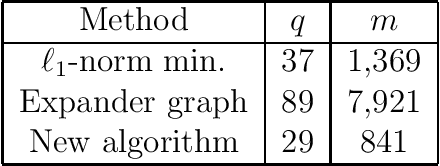
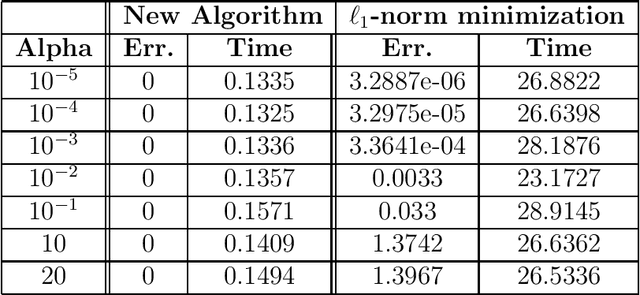
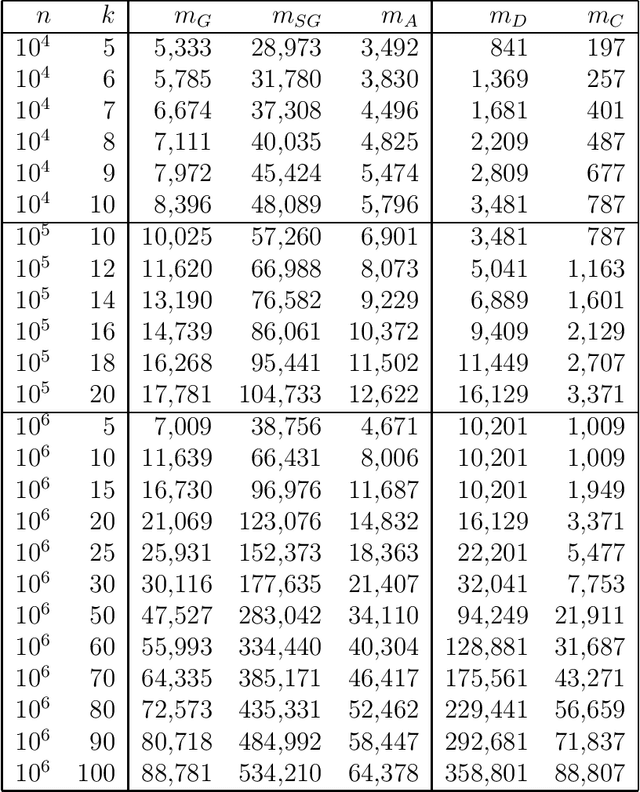
In this paper we present a new algorithm for compressive sensing that makes use of binary measurement matrices and achieves exact recovery of ultra sparse vectors, in a single pass and without any iterations. Due to its noniterative nature, our algorithm is hundreds of times faster than $\ell_1$-norm minimization, and methods based on expander graphs, both of which require multiple iterations. Our algorithm can accommodate nearly sparse vectors, in which case it recovers index set of the largest components, and can also accommodate burst noise measurements. Compared to compressive sensing methods that are guaranteed to achieve exact recovery of all sparse vectors, our method requires fewer measurements However, methods that achieve statistical recovery, that is, recovery of almost all but not all sparse vectors, can require fewer measurements than our method.