 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge5G Long-Term and Large-Scale Mobile Traffic Forecasting
Dec 21, 2022It is crucial for the service provider to comprehend and forecast mobile traffic in large-scale cellular networks in order to govern and manage mechanisms for base station placement, load balancing, and network planning. The purpose of this article is to extract and simulate traffic patterns from more than 14,000 cells that have been installed in different metropolitan areas. To do this, we create, implement, and assess a method in which cells are first categorized by their point of interest and then clustered based on the temporal distribution of cells in each region. The proposed model has been tested using real-world 5G mobile traffic datasets collected over 31 weeks in various cities. We found that our proposed model performed well in predicting mobile traffic patterns up to 2 weeks in advance. Our model outperformed the base model in most areas of interest and generally achieved up to 15\% less prediction error compared to the na\"ive approach. This indicates that our approach is effective in predicting mobile traffic patterns in large-scale cellular networks.
Building Height Prediction with Instance Segmentation
Dec 19, 2022Extracting building heights from satellite images is an active research area used in many fields such as telecommunications, city planning, etc. Many studies utilize DSM (Digital Surface Models) generated with lidars or stereo images for this purpose. Predicting the height of the buildings using only RGB images is challenging due to the insufficient amount of data, low data quality, variations of building types, different angles of light and shadow, etc. In this study, we present an instance segmentation-based building height extraction method to predict building masks with their respective heights from a single RGB satellite image. We used satellite images with building height annotations of certain cities along with an open-source satellite dataset with the transfer learning approach. We reached, the bounding box mAP 59, the mask mAP 52.6, and the average accuracy value of 70% for buildings belonging to each height class in our test set.
Real Time Incremental Image Mosaicking Without Use of Any Camera Parameter
Dec 05, 2022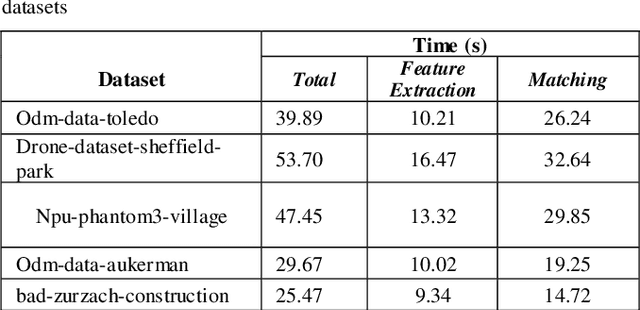
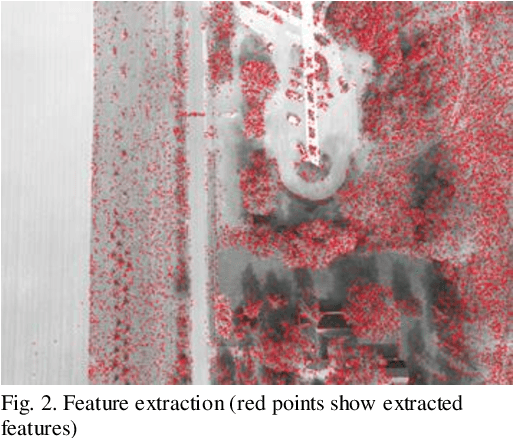
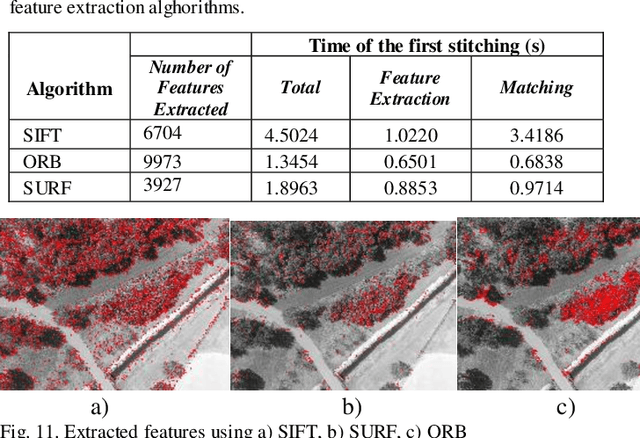
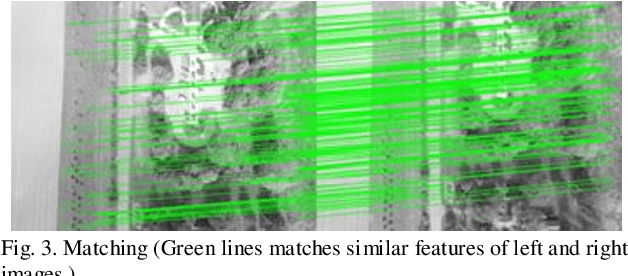
Over the past decade, there has been a significant increase in the use of Unmanned Aerial Vehicles (UAVs) to support a wide variety of missions, such as remote surveillance, vehicle tracking, and object detection. For problems involving processing of areas larger than a single image, the mosaicking of UAV imagery is a necessary step. Real-time image mosaicking is used for missions that requires fast response like search and rescue missions. It typically requires information from additional sensors, such as Global Position System (GPS) and Inertial Measurement Unit (IMU), to facilitate direct orientation, or 3D reconstruction approaches to recover the camera poses. This paper proposes a UAV-based system for real-time creation of incremental mosaics which does not require either direct or indirect camera parameters such as orientation information. Inspired by previous approaches, in the mosaicking process, feature extraction from images, matching of similar key points between images, finding homography matrix to warp and align images, and blending images to obtain mosaics better looking, plays important roles in the achievement of the high quality result. Edge detection is used in the blending step as a novel approach. Experimental results show that real-time incremental image mosaicking process can be completed satisfactorily and without need for any additional camera parameters.