 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvances on mechanical designs for assistive ankle-foot orthoses
Apr 21, 2023



Assistive ankle-foot orthoses (AFOs) are powerful solutions to assist or rehabilitate gait on humans. Existing assistive AFO technologies include passive, quasi-passive, and active principles to provide assistance to the users, and their mechanical configuration and control depend on the eventual support they aim for within the gait pattern. In this research we analyze the state-of-the-art of assistive AFOs and classify the different approaches into clusters, describing their basis and working principles. Additionally, we reviewed the purpose and experimental validation of the devices, providing the reader with a better view of the technology readiness level. Finally, the reviewed designs, limitations, and future steps in the field are summarized and discussed.
RoboWalk: Explicit Augmented Human-Robot Dynamics Modeling for Design Optimization
Jul 09, 2019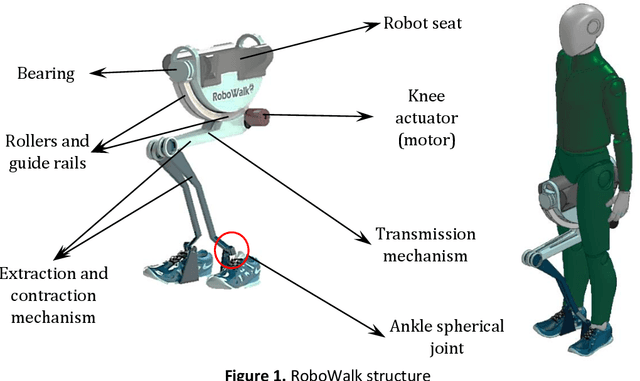
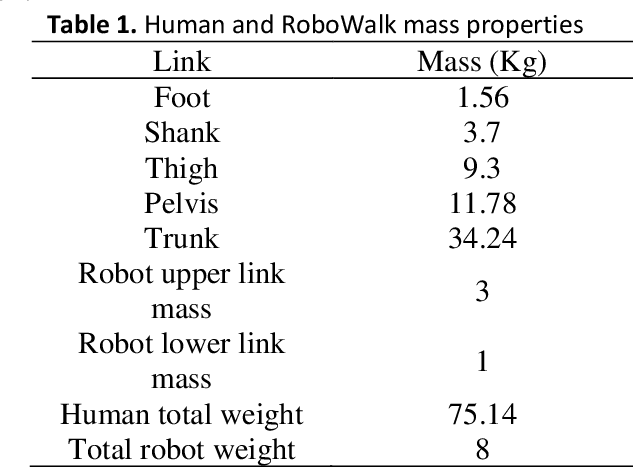

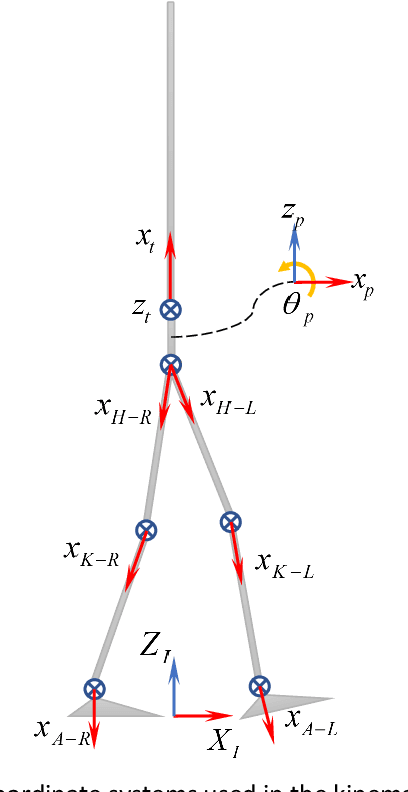
Utilizing orthoses and exoskeleton technology in various applications and medical industries, particularly to help elderly and ordinary people in their daily activities is a new growing field for research institutes. In this paper, after introducing an assistive lower limb exoskeleton (RoboWalk), the dynamics models of both multi-body kinematic tree structure human and robot is derived separately, using Newton's method. The obtained models are then verified by comparing the results with those of the Recursive Newton-Euler Algorithms (RNEA). These models are then augmented to investigate the RoboWalk joint torques, and those of the human body, and also the floor reaction force of the complete system. Since RoboWalk is an under-actuated robot, despite the assistive force, an undesirable disturbing force exerts to the human. So, optimization strategies are proposed to find an optimal design to maximize the assistive behavior of RoboWalk and reduce joint torques of the human body as a result. To this end, a human-in-the-loop optimization algorithm will be used. The solution of this optimization problem is carried out by Particle Swarm Optimization (PSO) method. The designed analysis and the optimization results demonstrate the effectiveness of the proposed approaches, leading to the elimination of disturbing forces, lower torque demand for RoboWalk motors and lower weights.