 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboWalk: Explicit Augmented Human-Robot Dynamics Modeling for Design Optimization
Paper and Code
Jul 09, 2019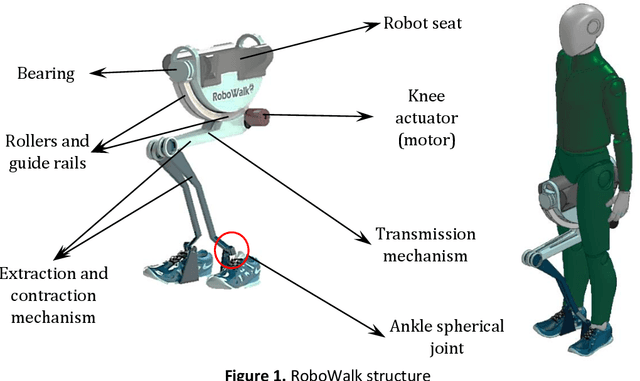
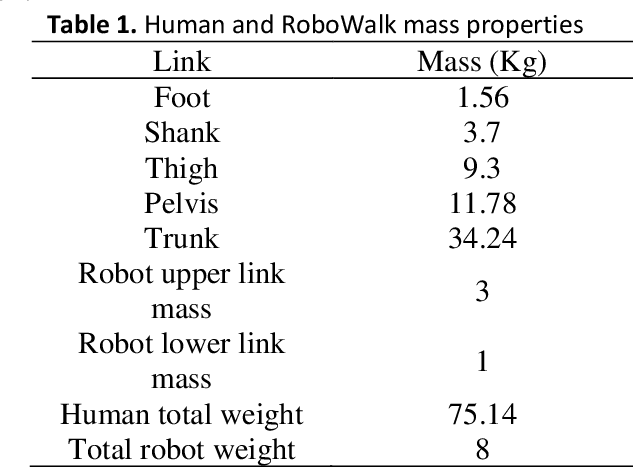

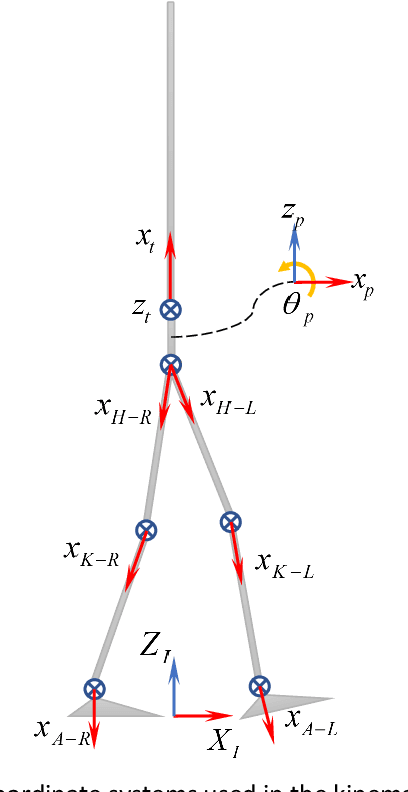
Utilizing orthoses and exoskeleton technology in various applications and medical industries, particularly to help elderly and ordinary people in their daily activities is a new growing field for research institutes. In this paper, after introducing an assistive lower limb exoskeleton (RoboWalk), the dynamics models of both multi-body kinematic tree structure human and robot is derived separately, using Newton's method. The obtained models are then verified by comparing the results with those of the Recursive Newton-Euler Algorithms (RNEA). These models are then augmented to investigate the RoboWalk joint torques, and those of the human body, and also the floor reaction force of the complete system. Since RoboWalk is an under-actuated robot, despite the assistive force, an undesirable disturbing force exerts to the human. So, optimization strategies are proposed to find an optimal design to maximize the assistive behavior of RoboWalk and reduce joint torques of the human body as a result. To this end, a human-in-the-loop optimization algorithm will be used. The solution of this optimization problem is carried out by Particle Swarm Optimization (PSO) method. The designed analysis and the optimization results demonstrate the effectiveness of the proposed approaches, leading to the elimination of disturbing forces, lower torque demand for RoboWalk motors and lower weights.