Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStable Stair-Climbing of a Quadruped Robot
Sep 08, 2018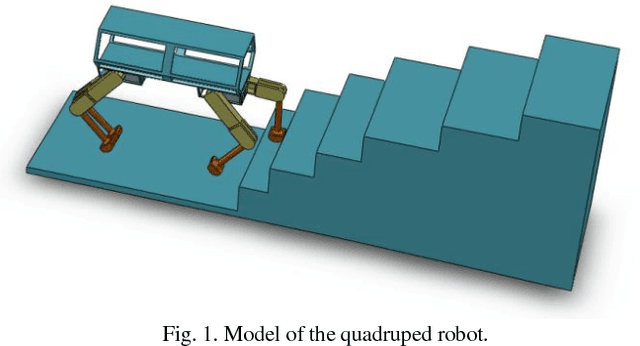
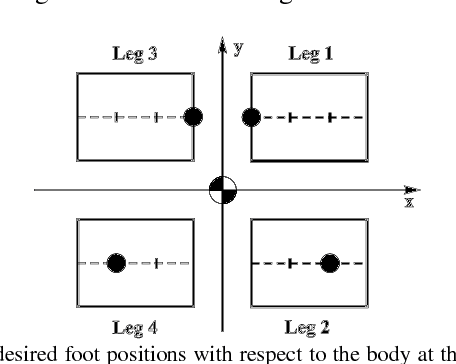
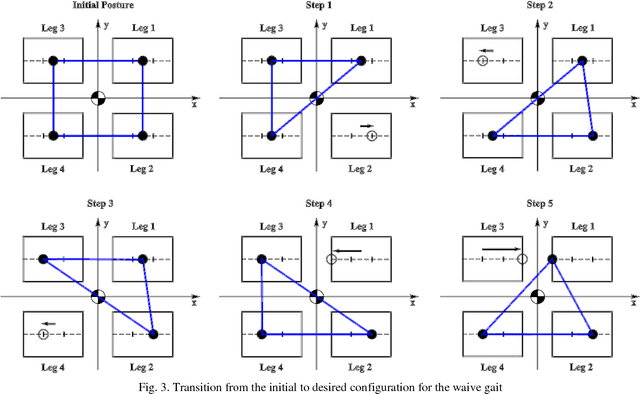
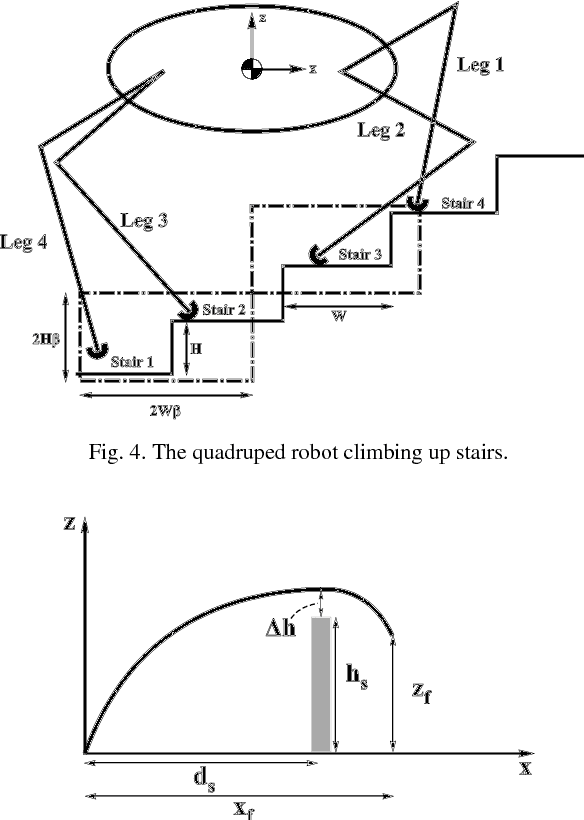
Synthesizing a stable gait that enables a quadruped robot to climb stairs is the focus of this paper. To this end, first a stable transition from initial to desired configuration is made based on the minimum number of steps and maximum use of the leg workspace to prepare the robot for the movement. Next, swing leg and body trajectories are planned for a successful stair- climbing gait. Afterwards, a stable spinning gait is proposed to change the orientation of the body. We simulate our gait planning algorithms on a model of quadruped robot. The results show that the robot is able to climb up stairs, rotate about its yaw axis, and climb down stairs while its stability is guaranteed.
* Proceeding of the 2013 RSI/ISM International Conference on Robotics
and Mechatronics, February 13-15, 2013, Tehran, Iran
Via