 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Lane Detection in Crowds using Proximity Graphs
Jul 06, 2017
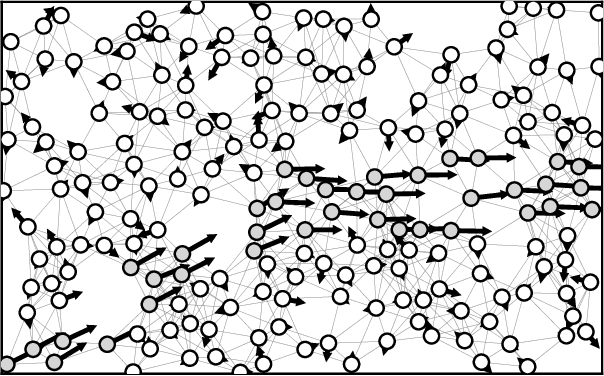
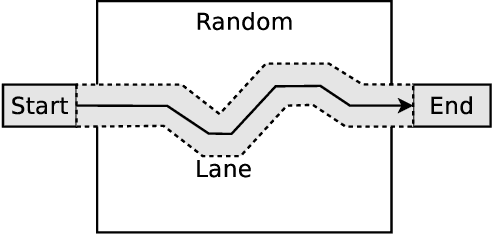
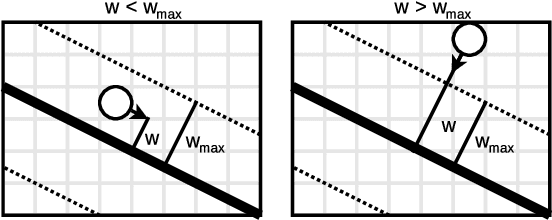
Studying the behavior of crowds is vital for understanding and predicting human interactions in public areas. Research has shown that, under certain conditions, large groups of people can form collective behavior patterns: local interactions between individuals results in global movements patterns. To detect these patterns in a crowd, we assume each person is carrying an on-body device that acts a local proximity sensor, e.g., smartphone or bluetooth badge, and represent the texture of the crowd as a proximity graph. Our goal is extract information about crowds from these proximity graphs. In this work, we focus on one particular type of pattern: lane formation. We present a formal definition of a lane, proposed a simple probabilistic model that simulates lanes moving through a stationary crowd, and present an automated lane-detection method. Our preliminary results show that our method is able to detect lanes of different shapes and sizes. We see our work as an initial step towards rich pattern recognition using proximity graphs.
Spaceprint: a Mobility-based Fingerprinting Scheme for Public Spaces
Mar 29, 2017
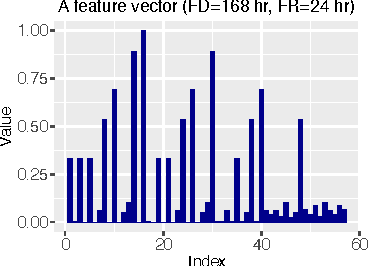


In this paper, we address the problem of how automated situation-awareness can be achieved by learning real-world situations from ubiquitously generated mobility data. Without semantic input about the time and space where situations take place, this turns out to be a fundamental challenging problem. Uncertainties also introduce technical challenges when data is generated in irregular time intervals, being mixed with noise, and errors. Purely relying on temporal patterns observable in mobility data, in this paper, we propose Spaceprint, a fully automated algorithm for finding the repetitive pattern of similar situations in spaces. We evaluate this technique by showing how the latent variables describing the category, and the actual identity of a space can be discovered from the extracted situation patterns. Doing so, we use different real-world mobility datasets with data about the presence of mobile entities in a variety of spaces. We also evaluate the performance of this technique by showing its robustness against uncertainties.