 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerson Detection Using an Ultra Low-resolution Thermal Imager on a Low-cost MCU
Dec 16, 2022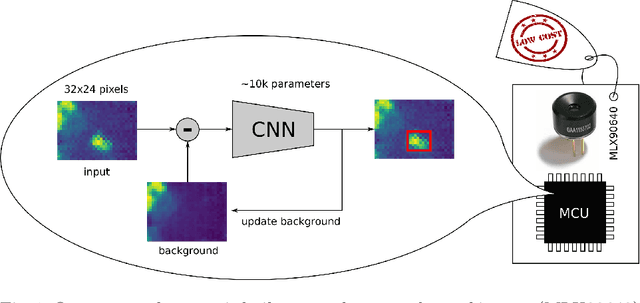
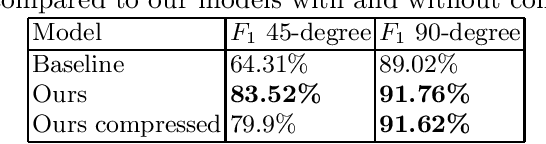
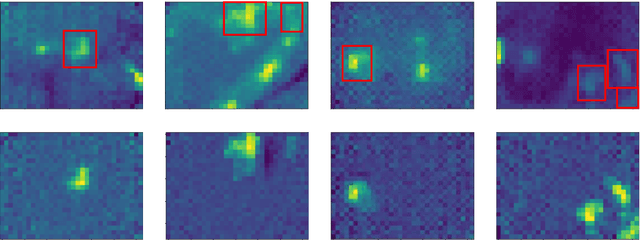
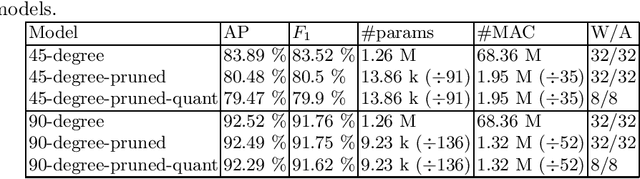
Detecting persons in images or video with neural networks is a well-studied subject in literature. However, such works usually assume the availability of a camera of decent resolution and a high-performance processor or GPU to run the detection algorithm, which significantly increases the cost of a complete detection system. However, many applications require low-cost solutions, composed of cheap sensors and simple microcontrollers. In this paper, we demonstrate that even on such hardware we are not condemned to simple classic image processing techniques. We propose a novel ultra-lightweight CNN-based person detector that processes thermal video from a low-cost 32x24 pixel static imager. Trained and compressed on our own recorded dataset, our model achieves up to 91.62% accuracy (F1-score), has less than 10k parameters, and runs as fast as 87ms and 46ms on low-cost microcontrollers STM32F407 and STM32F746, respectively.
Low-latency hand gesture recognition with a low resolution thermal imager
Apr 24, 2020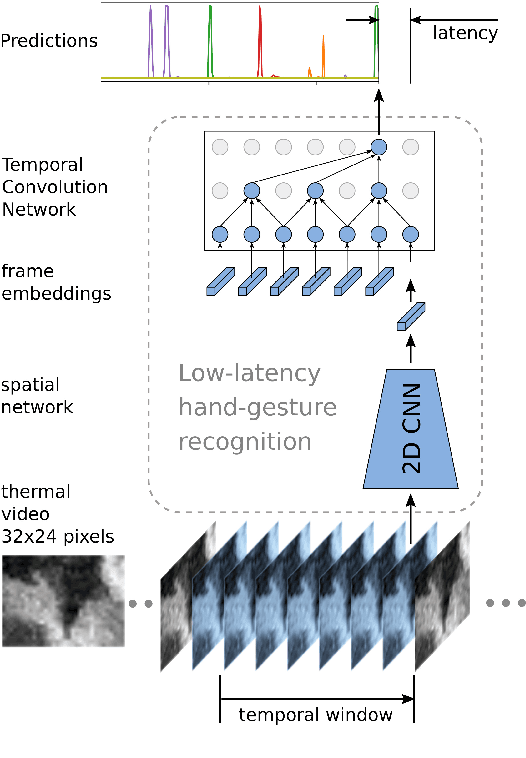
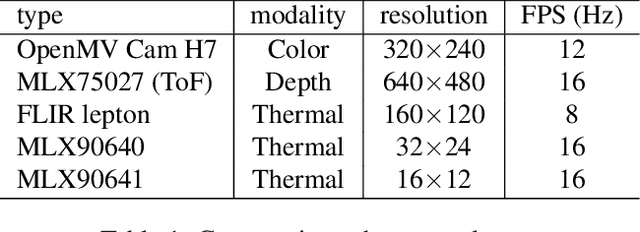

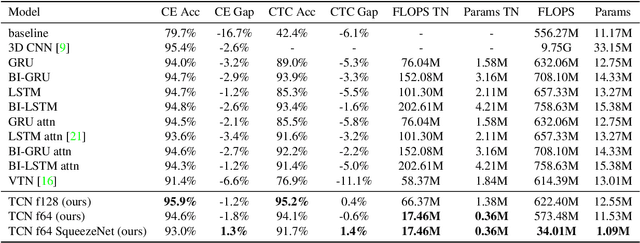
Using hand gestures to answer a call or to control the radio while driving a car, is nowadays an established feature in more expensive cars. High resolution time-of-flight cameras and powerful embedded processors usually form the heart of these gesture recognition systems. This however comes with a price tag. We therefore investigate the possibility to design an algorithm that predicts hand gestures using a cheap low-resolution thermal camera with only 32x24 pixels, which is light-weight enough to run on a low-cost processor. We recorded a new dataset of over 1300 video clips for training and evaluation and propose a light-weight low-latency prediction algorithm. Our best model achieves 95.9% classification accuracy and 83% mAP detection accuracy while its processing pipeline has a latency of only one frame.
Super accurate low latency object detection on a surveillance UAV
Apr 03, 2019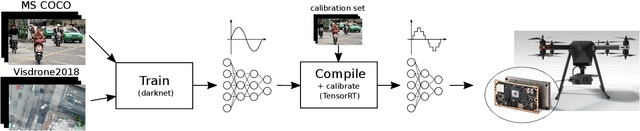
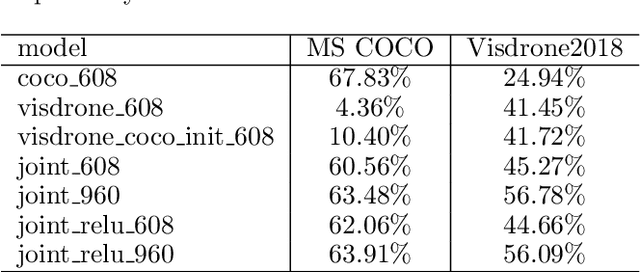
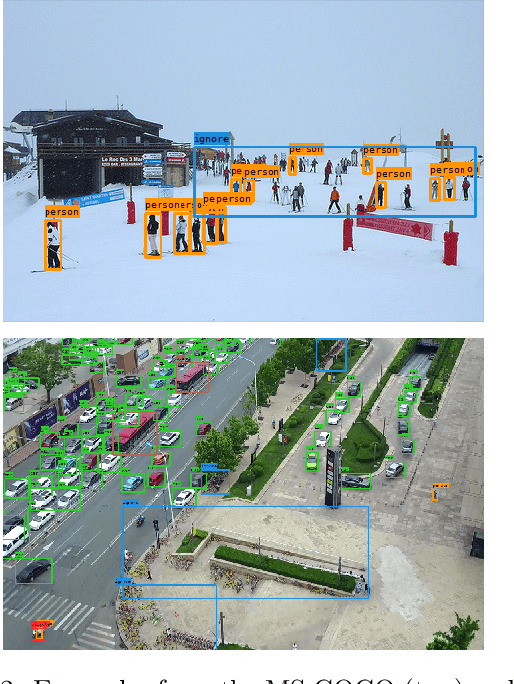
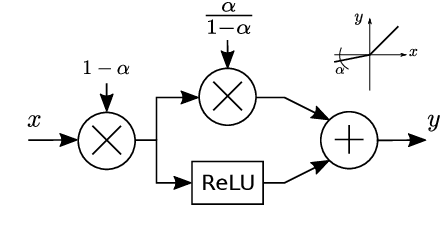
Drones have proven to be useful in many industry segments such as security and surveillance, where e.g. on-board real-time object tracking is a necessity for autonomous flying guards. Tracking and following suspicious objects is therefore required in real-time on limited hardware. With an object detector in the loop, low latency becomes extremely important. In this paper, we propose a solution to make object detection for UAVs both fast and super accurate. We propose a multi-dataset learning strategy yielding top eye-sky object detection accuracy. Our model generalizes well on unseen data and can cope with different flying heights, optically zoomed-in shots and different viewing angles. We apply optimization steps such that we achieve minimal latency on embedded on-board hardware by fusing layers, quantizing calculations to 16-bit floats and 8-bit integers, with negligible loss in accuracy. We validate on NVIDIA's Jetson TX2 and Jetson Xavier platforms where we achieve a speed-wise performance boost of more than 10x.