 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDISTINQT: A Distributed Privacy Aware Learning Framework for QoS Prediction for Future Mobile and Wireless Networks
Jan 15, 2024



Beyond 5G and 6G networks are expected to support new and challenging use cases and applications that depend on a certain level of Quality of Service (QoS) to operate smoothly. Predicting the QoS in a timely manner is of high importance, especially for safety-critical applications as in the case of vehicular communications. Although until recent years the QoS prediction has been carried out by centralized Artificial Intelligence (AI) solutions, a number of privacy, computational, and operational concerns have emerged. Alternative solutions have been surfaced (e.g. Split Learning, Federated Learning), distributing AI tasks of reduced complexity across nodes, while preserving the privacy of the data. However, new challenges rise when it comes to scalable distributed learning approaches, taking into account the heterogeneous nature of future wireless networks. The current work proposes DISTINQT, a privacy-aware distributed learning framework for QoS prediction. Our framework supports multiple heterogeneous nodes, in terms of data types and model architectures, by sharing computations across them. This, enables the incorporation of diverse knowledge into a sole learning process that will enhance the robustness and generalization capabilities of the final QoS prediction model. DISTINQT also contributes to data privacy preservation by encoding any raw input data into a non-linear latent representation before any transmission. Evaluation results showcase that our framework achieves a statistically identical performance compared to its centralized version and an average performance improvement of up to 65% against six state-of-the-art centralized baseline solutions in the Tele-Operated Driving use case.
A Safe Deep Reinforcement Learning Approach for Energy Efficient Federated Learning in Wireless Communication Networks
Aug 21, 2023Progressing towards a new era of Artificial Intelligence (AI) - enabled wireless networks, concerns regarding the environmental impact of AI have been raised both in industry and academia. Federated Learning (FL) has emerged as a key privacy preserving decentralized AI technique. Despite efforts currently being made in FL, its environmental impact is still an open problem. Targeting the minimization of the overall energy consumption of an FL process, we propose the orchestration of computational and communication resources of the involved devices to minimize the total energy required, while guaranteeing a certain performance of the model. To this end, we propose a Soft Actor Critic Deep Reinforcement Learning (DRL) solution, where a penalty function is introduced during training, penalizing the strategies that violate the constraints of the environment, and ensuring a safe RL process. A device level synchronization method, along with a computationally cost effective FL environment are proposed, with the goal of further reducing the energy consumption and communication overhead. Evaluation results show the effectiveness of the proposed scheme compared to four state-of-the-art baseline solutions in both static and dynamic environments, achieving a decrease of up to 94% in the total energy consumption.
A Safe Genetic Algorithm Approach for Energy Efficient Federated Learning in Wireless Communication Networks
Jul 05, 2023



Federated Learning (FL) has emerged as a decentralized technique, where contrary to traditional centralized approaches, devices perform a model training in a collaborative manner, while preserving data privacy. Despite the existing efforts made in FL, its environmental impact is still under investigation, since several critical challenges regarding its applicability to wireless networks have been identified. Towards mitigating the carbon footprint of FL, the current work proposes a Genetic Algorithm (GA) approach, targeting the minimization of both the overall energy consumption of an FL process and any unnecessary resource utilization, by orchestrating the computational and communication resources of the involved devices, while guaranteeing a certain FL model performance target. A penalty function is introduced in the offline phase of the GA that penalizes the strategies that violate the constraints of the environment, ensuring a safe GA process. Evaluation results show the effectiveness of the proposed scheme compared to two state-of-the-art baseline solutions, achieving a decrease of up to 83% in the total energy consumption.
Hybrid Model and Data Driven Algorithm for Online Learning of Any-to-Any Path Loss Maps
Jul 14, 2021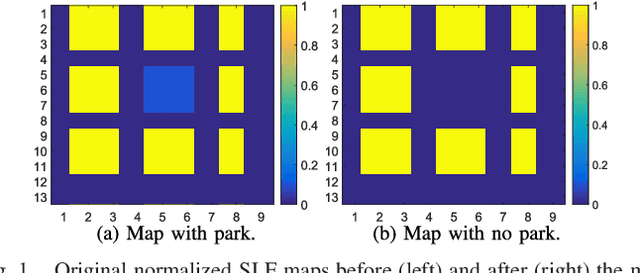
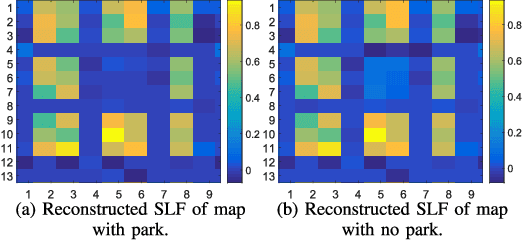
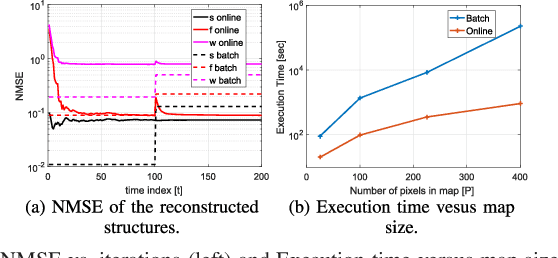
Learning any-to-any (A2A) path loss maps, where the objective is the reconstruction of path loss between any two given points in a map, might be a key enabler for many applications that rely on device-to-device (D2D) communication. Such applications include machine-type communications (MTC) or vehicle-to-vehicle (V2V) communications. Current approaches for learning A2A maps are either model-based methods, or pure data-driven methods. Model-based methods have the advantage that they can generate reliable estimations with low computational complexity, but they cannot exploit information coming from data. Pure data-driven methods can achieve good performance without assuming any physical model, but their complexity and their lack of robustness is not acceptable for many applications. In this paper, we propose a novel hybrid model and data-driven approach that fuses information obtained from datasets and models in an online fashion. To that end, we leverage the framework of stochastic learning to deal with the sequential arrival of samples and propose an online algorithm that alternatively and sequentially minimizes the original non-convex problem. A proof of convergence is presented, along with experiments based firstly on synthetic data, and secondly on a more realistic dataset for V2X, with both experiments showing promising results.