 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMalliavin Calculus for Counterfactual Gradient Estimation in Adaptive Inverse Reinforcement Learning
Apr 01, 2026Inverse reinforcement learning (IRL) recovers the loss function of a forward learner from its observed responses adaptive IRL aims to reconstruct the loss function of a forward learner by passively observing its gradients as it performs reinforcement learning (RL). This paper proposes a novel passive Langevin-based algorithm that achieves adaptive IRL. The key difficulty in adaptive IRL is that the required gradients in the passive algorithm are counterfactual, that is, they are conditioned on events of probability zero under the forward learner's trajectory. Therefore, naive Monte Carlo estimators are prohibitively inefficient, and kernel smoothing, though common, suffers from slow convergence. We overcome this by employing Malliavin calculus to efficiently estimate the required counterfactual gradients. We reformulate the counterfactual conditioning as a ratio of unconditioned expectations involving Malliavin quantities, thus recovering standard estimation rates. We derive the necessary Malliavin derivatives and their adjoint Skorohod integral formulations for a general Langevin structure, and provide a concrete algorithmic approach which exploits these for counterfactual gradient estimation.
Efficient Neural SDE Training using Wiener-Space Cubature
Feb 18, 2025A neural stochastic differential equation (SDE) is an SDE with drift and diffusion terms parametrized by neural networks. The training procedure for neural SDEs consists of optimizing the SDE vector field (neural network) parameters to minimize the expected value of an objective functional on infinite-dimensional path-space. Existing training techniques focus on methods to efficiently compute path-wise gradients of the objective functional with respect to these parameters, then pair this with Monte-Carlo simulation to estimate the expectation, and stochastic gradient descent to optimize. In this work we introduce a novel training technique which bypasses and improves upon Monte-Carlo simulation; we extend results in the theory of Wiener-space cubature to approximate the expected objective functional by a weighted sum of deterministic ODE solutions. This allows us to compute gradients by efficient ODE adjoint methods. Furthermore, we exploit a high-order recombination scheme to drastically reduce the number of ODE solutions necessary to achieve a reasonable approximation. We show that this Wiener-space cubature approach can surpass the O(1/sqrt(n)) rate of Monte-Carlo simulation, or the O(log(n)/n) rate of quasi-Monte-Carlo, to achieve a O(1/n) rate under reasonable assumptions.
Distributionally Robust Inverse Reinforcement Learning for Identifying Multi-Agent Coordinated Sensing
Sep 22, 2024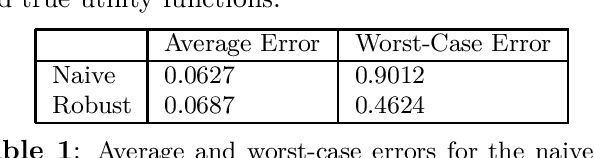
We derive a minimax distributionally robust inverse reinforcement learning (IRL) algorithm to reconstruct the utility functions of a multi-agent sensing system. Specifically, we construct utility estimators which minimize the worst-case prediction error over a Wasserstein ambiguity set centered at noisy signal observations. We prove the equivalence between this robust estimation and a semi-infinite optimization reformulation, and we propose a consistent algorithm to compute solutions. We illustrate the efficacy of this robust IRL scheme in numerical studies to reconstruct the utility functions of a cognitive radar network from observed tracking signals.
Statistical Detection of Coordination in a Cognitive Radar Network through Inverse Multi-objective Optimization
Apr 18, 2023Consider a target being tracked by a cognitive radar network. If the target can intercept noisy radar emissions, how can it detect coordination in the radar network? By 'coordination' we mean that the radar emissions satisfy Pareto optimality with respect to multi-objective optimization over the objective functions of each radar and a constraint on total network power output. This paper provides a novel inverse multi-objective optimization approach for statistically detecting Pareto optimal ('coordinating') behavior, from a finite dataset of noisy radar emissions. Specifically, we develop necessary and sufficient conditions for radar network emissions to be consistent with multi-objective optimization (coordination), and we provide a statistical detector with theoretical guarantees for determining this consistency when radar emissions are observed in noise. We also provide numerical simulations which validate our approach. Note that while we make use of the specific framework of a radar network coordination problem, our results apply more generally to the field of inverse multi-objective optimization.
Finite-Sample Bounds for Adaptive Inverse Reinforcement Learning using Passive Langevin Dynamics
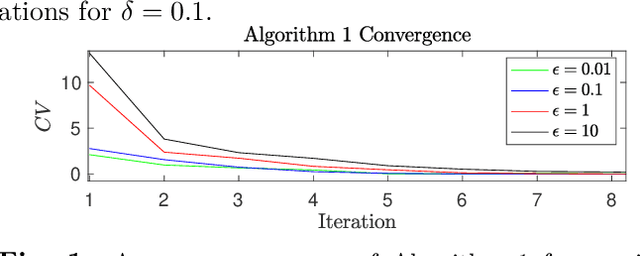
Apr 18, 2023Stochastic gradient Langevin dynamics (SGLD) are a useful methodology for sampling from probability distributions. This paper provides a finite sample analysis of a passive stochastic gradient Langevin dynamics algorithm (PSGLD) designed to achieve inverse reinforcement learning. By "passive", we mean that the noisy gradients available to the PSGLD algorithm (inverse learning process) are evaluated at randomly chosen points by an external stochastic gradient algorithm (forward learner). The PSGLD algorithm thus acts as a randomized sampler which recovers the cost function being optimized by this external process. Previous work has analyzed the asymptotic performance of this passive algorithm using stochastic approximation techniques; in this work we analyze the non-asymptotic performance. Specifically, we provide finite-time bounds on the 2-Wasserstein distance between the passive algorithm and its stationary measure, from which the reconstructed cost function is obtained.
Identifying Coordination in a Cognitive Radar Network -- A Multi-Objective Inverse Reinforcement Learning Approach
Nov 13, 2022Consider a target being tracked by a cognitive radar network. If the target can intercept some radar network emissions, how can it detect coordination among the radars? By 'coordination' we mean that the radar emissions satisfy Pareto optimality with respect to multi-objective optimization over each radar's utility. This paper provides a novel multi-objective inverse reinforcement learning approach which allows for both detection of such Pareto optimal ('coordinating') behavior and subsequent reconstruction of each radar's utility function, given a finite dataset of radar network emissions. The method for accomplishing this is derived from the micro-economic setting of Revealed Preferences, and also applies to more general problems of inverse detection and learning of multi-objective optimizing systems.
Quickest Detection for Human-Sensor Systems using Quantum Decision Theory
Aug 18, 2022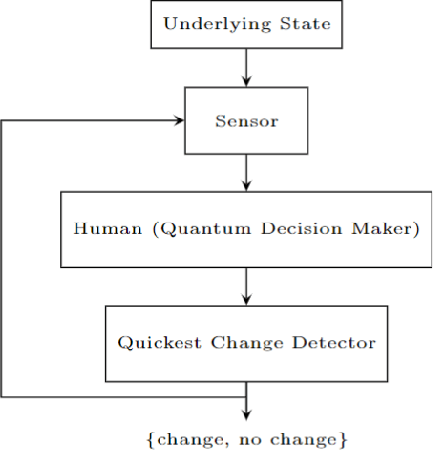
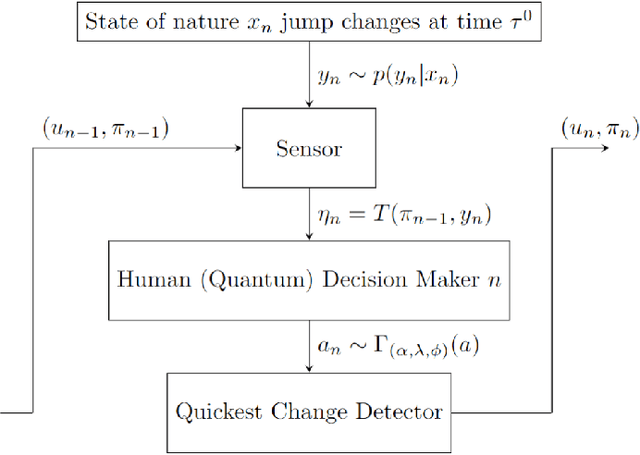
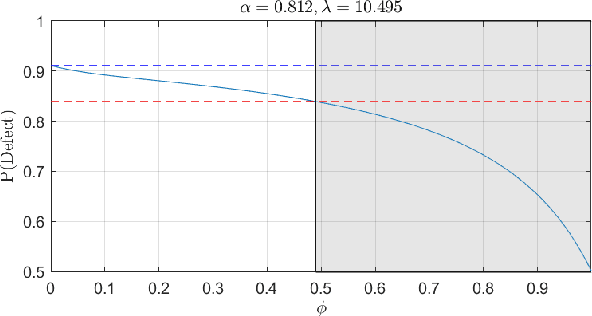
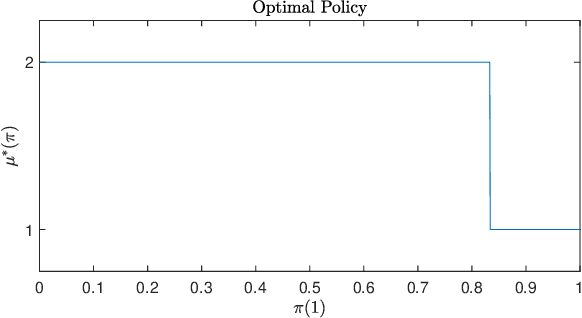
In mathematical psychology, recent models for human decision-making use Quantum Decision Theory to capture important human-centric features such as order effects and violation of the sure-thing principle (total probability law). We construct and analyze a human-sensor system where a quickest detector aims to detect a change in an underlying state by observing human decisions that are influenced by the state. Apart from providing an analytical framework for such human-sensor systems, we also analyze the structure of the quickest detection policy. We show that the quickest detection policy has a single threshold and the optimal cost incurred is lower bounded by that of the classical quickest detector. This indicates that intermediate human decisions strictly hinder detection performance. We also analyze the sensitivity of the quickest detection cost with respect to the quantum decision parameters of the human decision maker, revealing that the performance is robust to inaccurate knowledge of the decision-making process. Numerical results are provided which suggest that observing the decisions of more rational decision makers will improve the quickest detection performance. Finally, we illustrate a numerical implementation of this quickest detector in the context of the Prisoner's Dilemma problem, in which it has been observed that Quantum Decision Theory can uniquely model empirically tested violations of the sure-thing principle.