 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Human Ratings for Feedback Control: A Supervised Learning Approach with Application to Rehabilitation Robotics
Jun 24, 2019
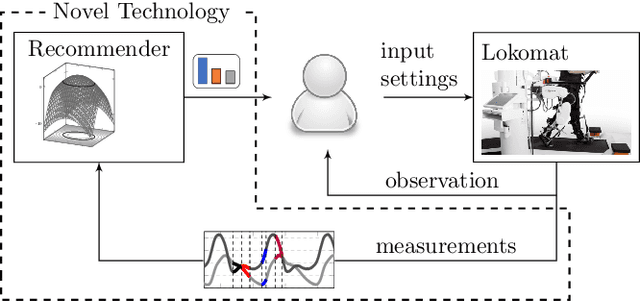

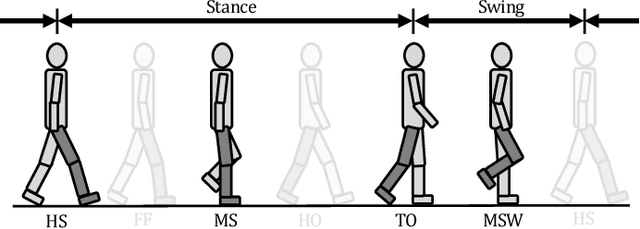
This paper presents a method for tailoring a parametric controller based on human ratings. The method leverages supervised learning concepts in order to train a reward model from data. It is applied to a gait rehabilitation robot with the goal of teaching the robot how to walk patients physiologically. In this context, the reward model judges the physiology of the gait cycle (instead of therapists) using sensor measurements provided by the robot and the automatic feedback controller chooses the input settings of the robot so as to maximize the reward. The key advantage of the proposed method is that only a few input adaptations are necessary to achieve a physiological gait cycle. Experiments with non-disabled subjects show that the proposed method permits the incorporation of human expertise into a control law and to automatically walk patients physiologically.