 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmotion in Future Intelligent Machines
Sep 30, 2020



Over the past decades, research in cognitive and affective neuroscience has emphasized that emotion is crucial for human intelligence and in fact inseparable from cognition. Concurrently, there has been a significantly growing interest in simulating and modeling emotion in robots and artificial agents. Yet, existing models of emotion and their integration in cognitive architectures remain quite limited and frequently disconnected from neuroscientific evidence. We argue that a stronger integration of emotion in robot models is critical for the design of intelligent machines capable of tackling real world problems. Drawing from current neuroscientific knowledge, we provide a set of guidelines for future research in artificial emotion and intelligent machines more generally.
Input-Cell Attention Reduces Vanishing Saliency of Recurrent Neural Networks
Oct 27, 2019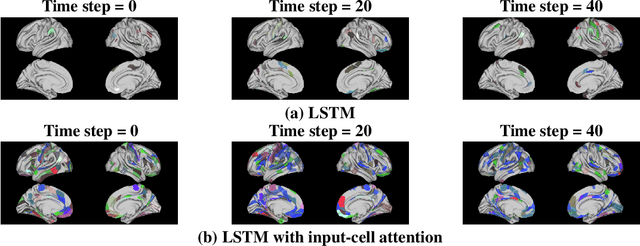
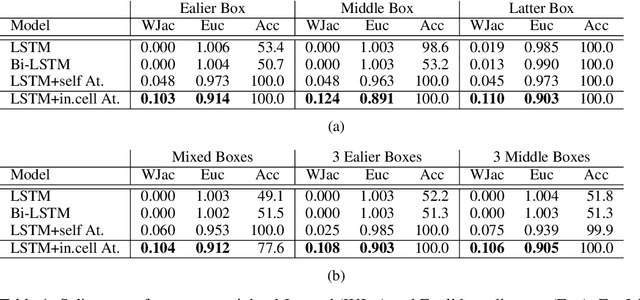
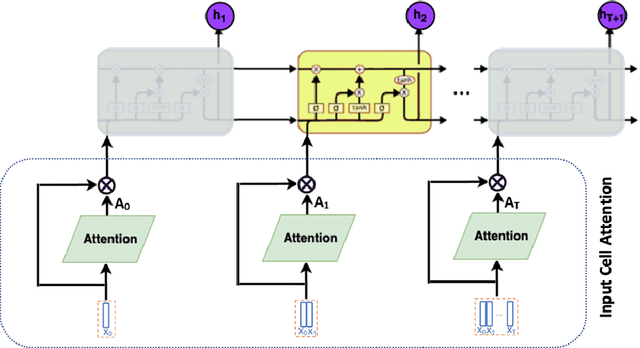
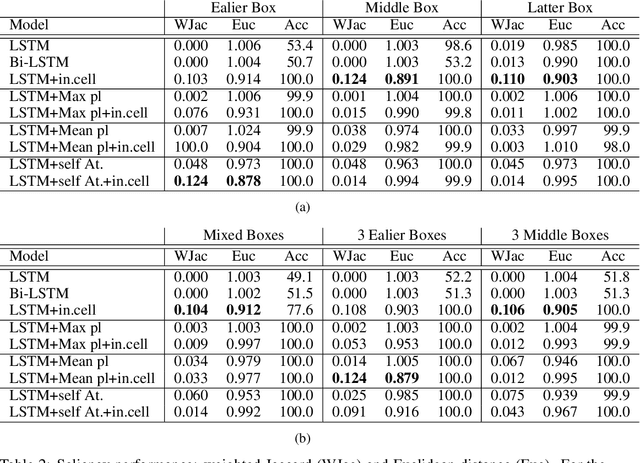
Recent efforts to improve the interpretability of deep neural networks use saliency to characterize the importance of input features to predictions made by models. Work on interpretability using saliency-based methods on Recurrent Neural Networks (RNNs) has mostly targeted language tasks, and their applicability to time series data is less understood. In this work we analyze saliency-based methods for RNNs, both classical and gated cell architectures. We show that RNN saliency vanishes over time, biasing detection of salient features only to later time steps and are, therefore, incapable of reliably detecting important features at arbitrary time intervals. To address this vanishing saliency problem, we propose a novel RNN cell structure (input-cell attention), which can extend any RNN cell architecture. At each time step, instead of only looking at the current input vector, input-cell attention uses a fixed-size matrix embedding, each row of the matrix attending to different inputs from current or previous time steps. Using synthetic data, we show that the saliency map produced by the input-cell attention RNN is able to faithfully detect important features regardless of their occurrence in time. We also apply the input-cell attention RNN on a neuroscience task analyzing functional Magnetic Resonance Imaging (fMRI) data for human subjects performing a variety of tasks. In this case, we use saliency to characterize brain regions (input features) for which activity is important to distinguish between tasks. We show that standard RNN architectures are only capable of detecting important brain regions in the last few time steps of the fMRI data, while the input-cell attention model is able to detect important brain region activity across time without latter time step biases.
Intelligent architectures for robotics: The merging of cognition and emotion
Feb 01, 2019



What is the place of emotion in intelligent robots? In the past two decades, researchers have advocated for the inclusion of some emotion-related components in the general information processing architecture of autonomous agents, say, for better communication with humans, or to instill a sense of urgency to action. The framework advanced here goes beyond these approaches and proposes that emotion and motivation need to be integrated with all aspects of the architecture. Thus, cognitive-emotional integration is a key design principle. Emotion is not an "add on" that endows a robot with "feelings" (for instance, reporting or expressing its internal state). It allows the significance of percepts, plans, and actions to be an integral part of all its computations. It is hypothesized that a sophisticated artificial intelligence cannot be built from separate cognitive and emotional modules. A hypothetical test inspired by the Turing test, called the Dolores test, is proposed to test this assertion.