 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBanana Ripeness Level Classification using a Simple CNN Model Trained with Real and Synthetic Datasets
Apr 11, 2025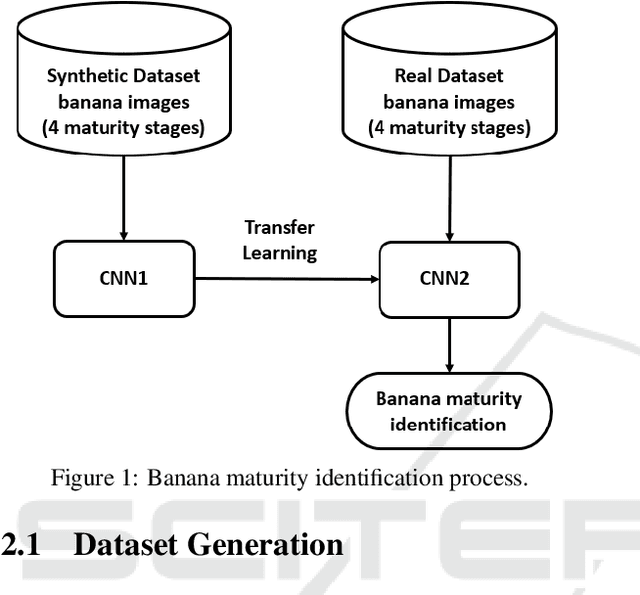
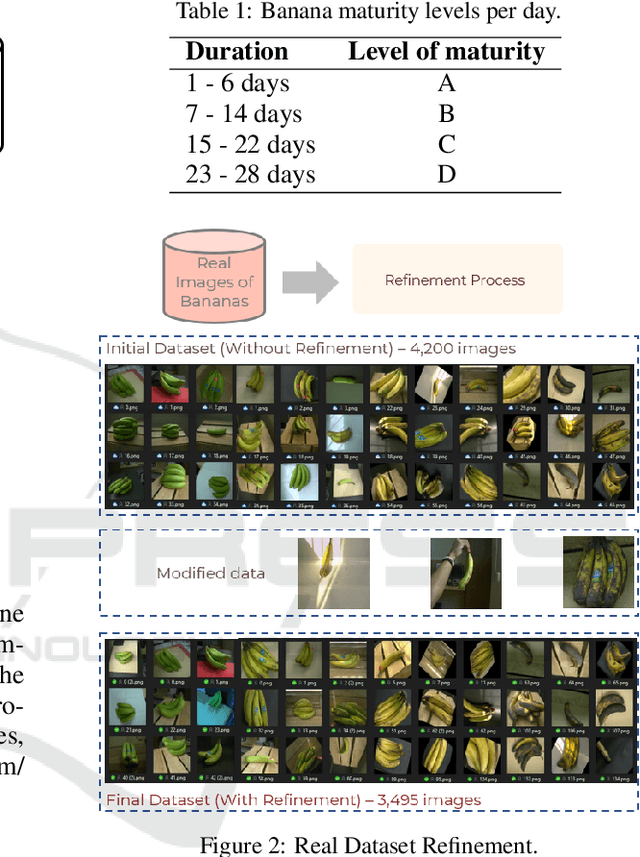
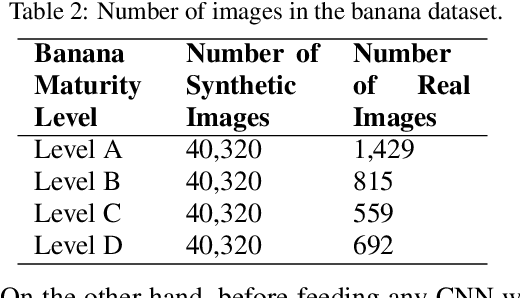
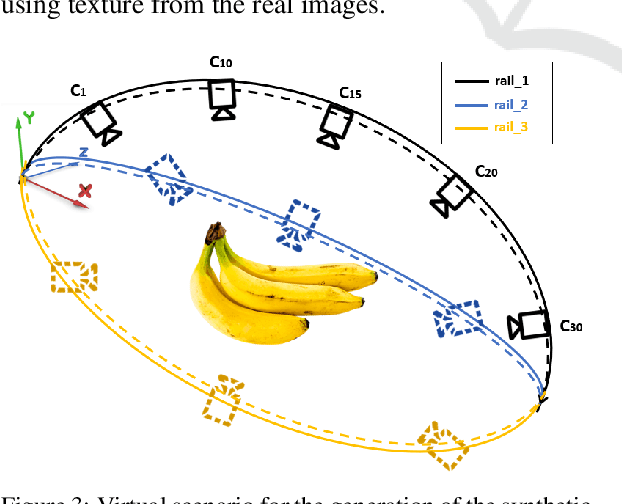
The level of ripeness is essential in determining the quality of bananas. To correctly estimate banana maturity, the metrics of international marketing standards need to be considered. However, the process of assessing the maturity of bananas at an industrial level is still carried out using manual methods. The use of CNN models is an attractive tool to solve the problem, but there is a limitation regarding the availability of sufficient data to train these models reliably. On the other hand, in the state-of-the-art, existing CNN models and the available data have reported that the accuracy results are acceptable in identifying banana maturity. For this reason, this work presents the generation of a robust dataset that combines real and synthetic data for different levels of banana ripeness. In addition, it proposes a simple CNN architecture, which is trained with synthetic data and using the transfer learning technique, the model is improved to classify real data, managing to determine the level of maturity of the banana. The proposed CNN model is evaluated with several architectures, then hyper-parameter configurations are varied, and optimizers are used. The results show that the proposed CNN model reaches a high accuracy of 0.917 and a fast execution time.
* 9 pages, 7 figures, conference
Classifying Healthy and Defective Fruits with a Multi-Input Architecture and CNN Models
Oct 14, 2024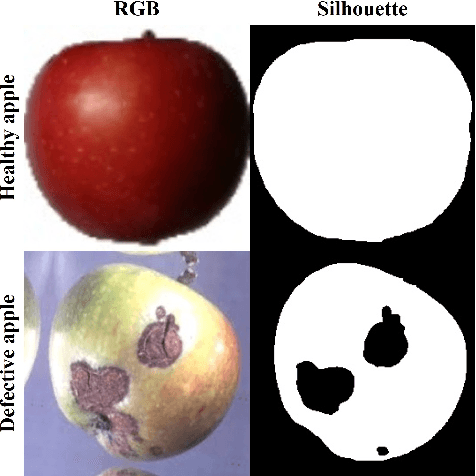
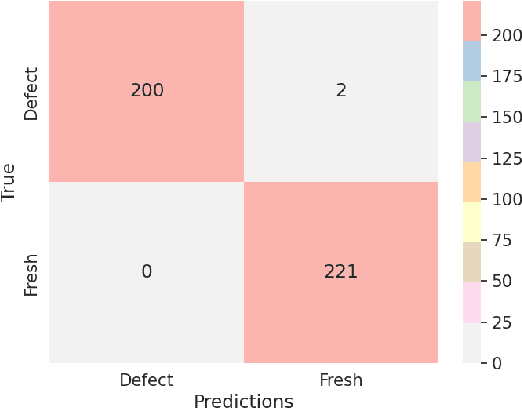
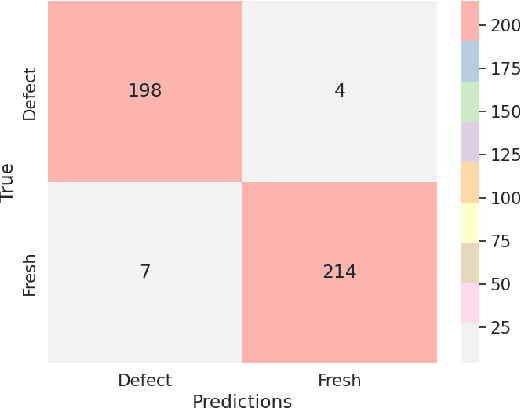
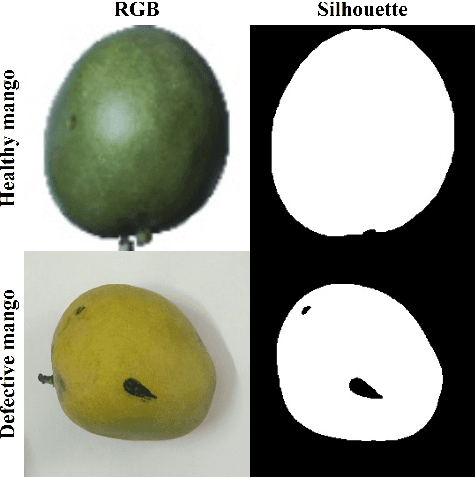
This study presents an investigation into the utilization of a Multi-Input architecture for the classification of fruits (apples and mangoes) into healthy and defective states, employing both RGB and silhouette images. The primary aim is to enhance the accuracy of CNN models. The methodology encompasses image acquisition, preprocessing of datasets, training, and evaluation of two CNN models: MobileNetV2 and VGG16. Results reveal that the inclusion of silhouette images alongside the Multi-Input architecture yields models with superior performance compared to using only RGB images for fruit classification, whether healthy or defective. Specifically, optimal results were achieved using the MobileNetV2 model, achieving 100\% accuracy. This finding suggests the efficacy of this combined methodology in improving the precise classification of healthy or defective fruits, which could have significant implications for applications related to external quality inspection of fruits.
* 7 pages, 11 figures
Mobile IoT device for BPM monitoring people with heart problems
Oct 08, 2024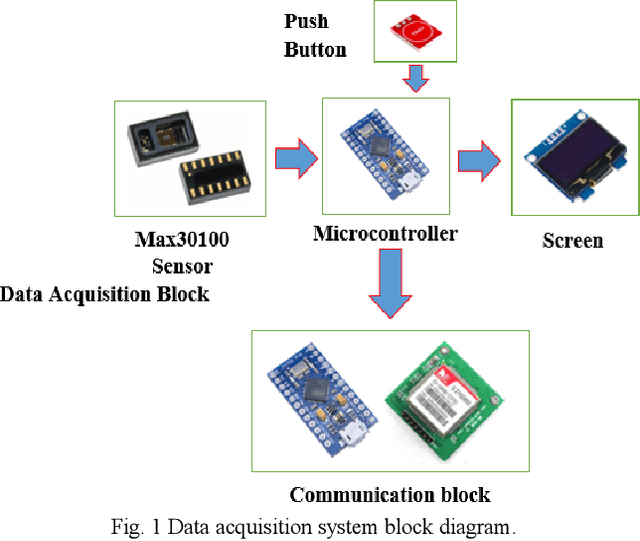
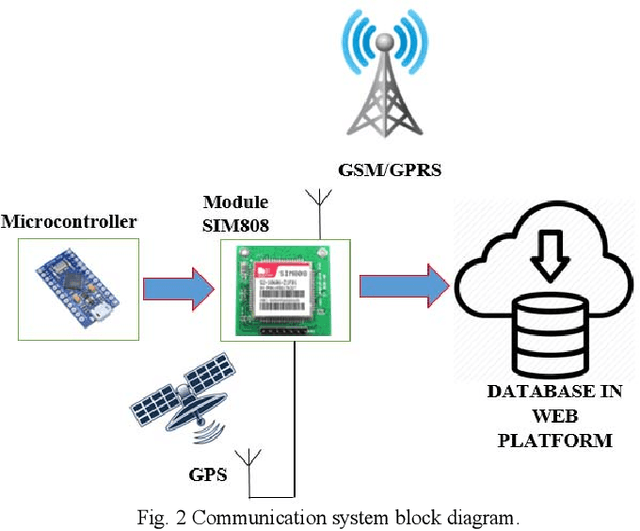
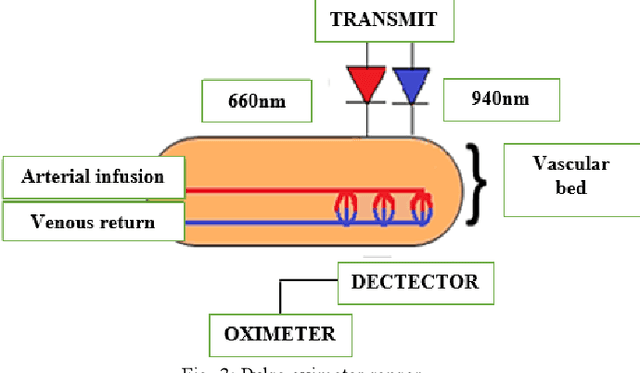
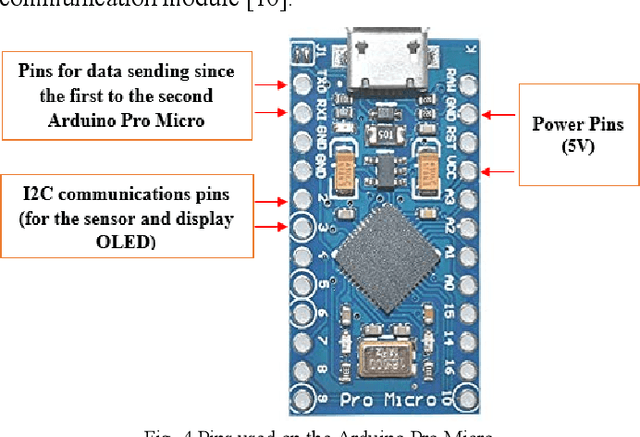
The developed system using a mobile electronic device for monitoring and warnings of heart problems, when the heart rate is outside the nominal range, which ranges from 60 to 100 beats per minute. Also, a system has been developed to save and monitor in real time changes of the cardiac pulsations, through a sensor connected to a control system. The connection of the communication module for Arduino GSM/GPRS/GPS, using the GPS network to locate the user. In addition, this device connects with GSM / GPRS technology that allows text messages to be sent to the contact number configured in the device, when warnings of heart problems are issued, moreover connects to the internet to store data in the cloud.
* 5 pages, 13 figures
Development of a Mouse for Individuals Without Upper Limbs Using Arduino Technology
Oct 05, 2024This project focuses on the design and construction of a prototype mouse based on the Arduino platform, intended for individuals without upper limbs to use computers more effectively. The prototype comprises a microcontroller responsible for processing signals from the MPU-6050 sensor, used as a reference for cursor position, and foot-operated buttons for right and left-click functions. Its design enables cursor control through head movements, providing users with an easy and intuitive way to interact with the computer's graphical interface. Feasibility testing was conducted through experimental trials, resulting in ideal accuracy and precision. These trials indicate that the device is viable for use in individuals without upper limbs.
* 6 pages, 9 figures
Kalman Filter Applied To A Differential Robot
Oct 05, 2024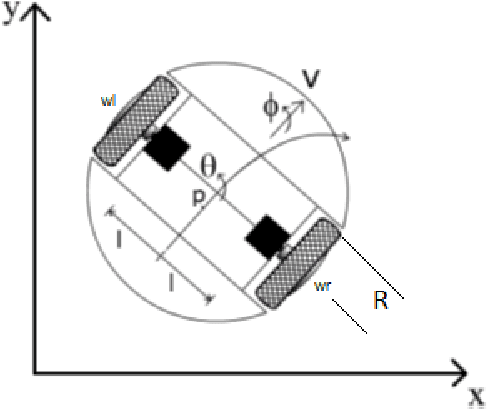
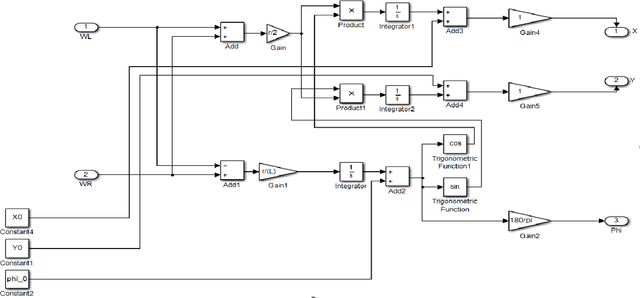
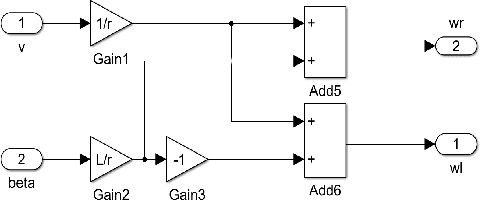
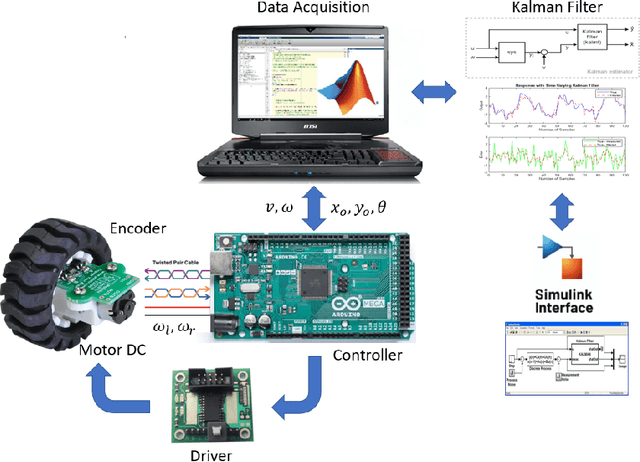
This document presents the study of the problem of location and trajectory that a robot must follow. It focuses on applying the Kalman filter to achieve location and trajectory estimation in an autonomous mobile differential robot. The experimental data was carried out through tests obtained with the help of two incremental encoders that are part of the construction of the differential robot. The data transmission is carried out from a PC where the control is carried out with the Matlab/Simulink software. The results are expressed in graphs showing the path followed by the robot using PI control, the estimator of the Kalman filter in a real system.
* 7 pages, 13 figures