Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKalman Filter Applied To A Differential Robot
Paper and Code
Oct 05, 2024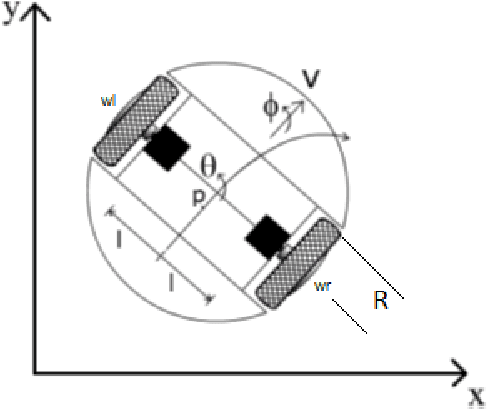
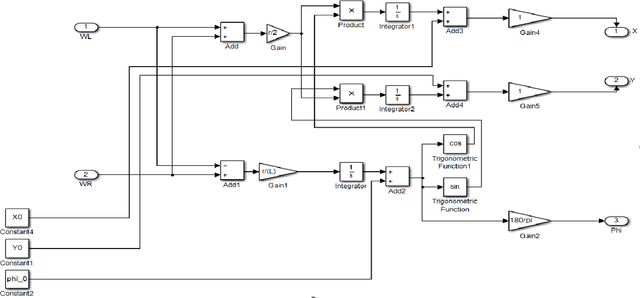
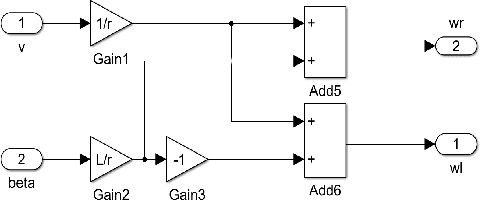
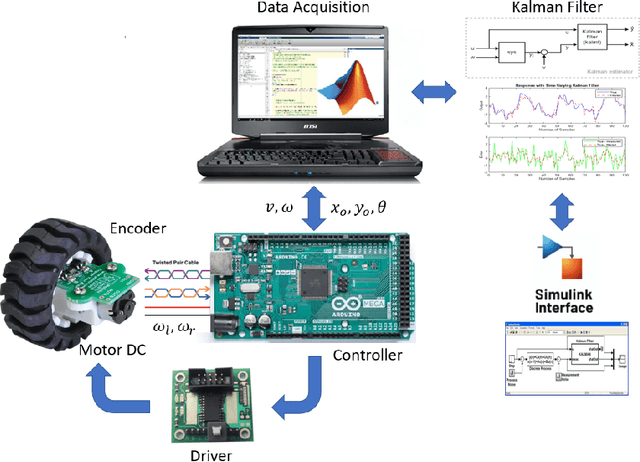
This document presents the study of the problem of location and trajectory that a robot must follow. It focuses on applying the Kalman filter to achieve location and trajectory estimation in an autonomous mobile differential robot. The experimental data was carried out through tests obtained with the help of two incremental encoders that are part of the construction of the differential robot. The data transmission is carried out from a PC where the control is carried out with the Matlab/Simulink software. The results are expressed in graphs showing the path followed by the robot using PI control, the estimator of the Kalman filter in a real system.
* 2023 1st International Conference on Circuits, Power and
Intelligent Systems (CCPIS) (pp. 1-6). IEEE * 7 pages, 13 figures
View paper on