 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHaptic communication optimises joint decisions and affords implicit confidence sharing
Dec 29, 2019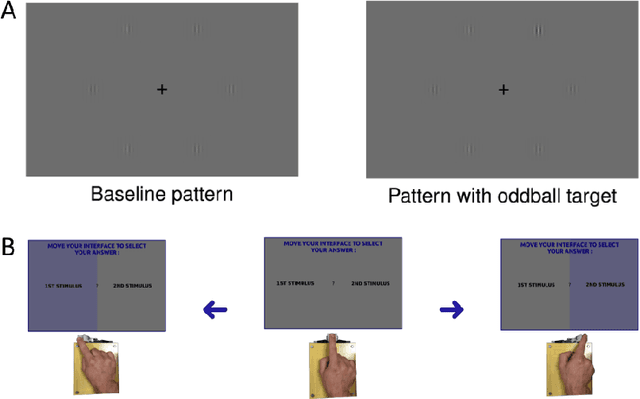

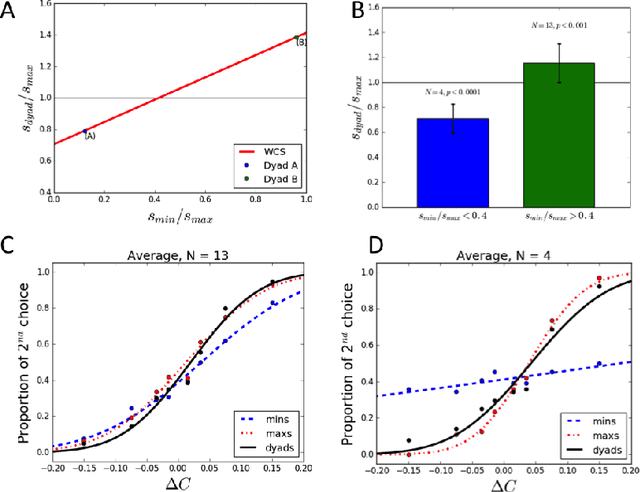
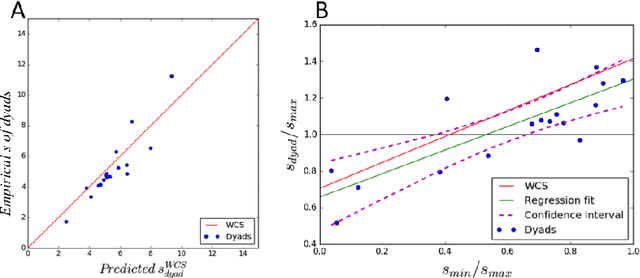
Group decisions can outperform the choices of the best individual group members. Previous research suggested that optimal group decisions require individuals to communicate explicitly (e.g., verbally) their confidence levels. Our study addresses the untested hypothesis that implicit communication using a sensorimotor channel -- haptic coupling -- may afford optimal group decisions, too. We report that haptically coupled dyads solve a perceptual discrimination task more accurately than their best individual members; and five times faster than dyads using explicit communication. Furthermore, our computational analyses indicate that the haptic channel affords implicit confidence sharing. We found that dyads take leadership over the choice and communicate their confidence in it by modulating both the timing and the force of their movements. Our findings may pave the way to negotiation technologies using fast sensorimotor communication to solve problems in groups.
Implementation of haptic communication in comanipulative tasks: a statistical state machine model
Apr 11, 2016



- This paper presents an experimental evaluation of physical human-human interaction in lightweight condition using a one degree of freedom robotized setup. It explores possible origins of Physical Human-Human communication, more precisely, the hypothesis of a time based communication. To explore if the communication is correlated to time a statistical state machine model based on physical Human-Human interaction is proposed. The model is tested with 14 subjects and presents results that are close to human-human performances.
A Reactive Robotized Interface for Lower Limb Rehabilitation: Clinical Results
Jul 02, 2015



-This article presents clinical results from the use of MONIMAD, a reactive robotized interface for lower limb Rehabilitation of patients suffering from cerebellar disease. The first problem to be addressed is the postural analysis of sit-to-stand motion. Experiments with healthy subjects were performed for this purpose. Analysis of external forces shows that sit-to-stand transfer can be subdivided into several phases: preaccel-eration, acceleration, start rising, rising. Observation of Center of Pressure, ground forces and horizontal components force on handles yields rules to identify the stability of the patient and to adjust the robotic interface motion to the human voluntary movement. These rules are used in a fuzzy-based controller implementation. The controller is validated on experiments with diseased patients in Bellan Hospital.