 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBi-objective trail-planning for a robot team orienteering in a hazardous environment
Sep 18, 2024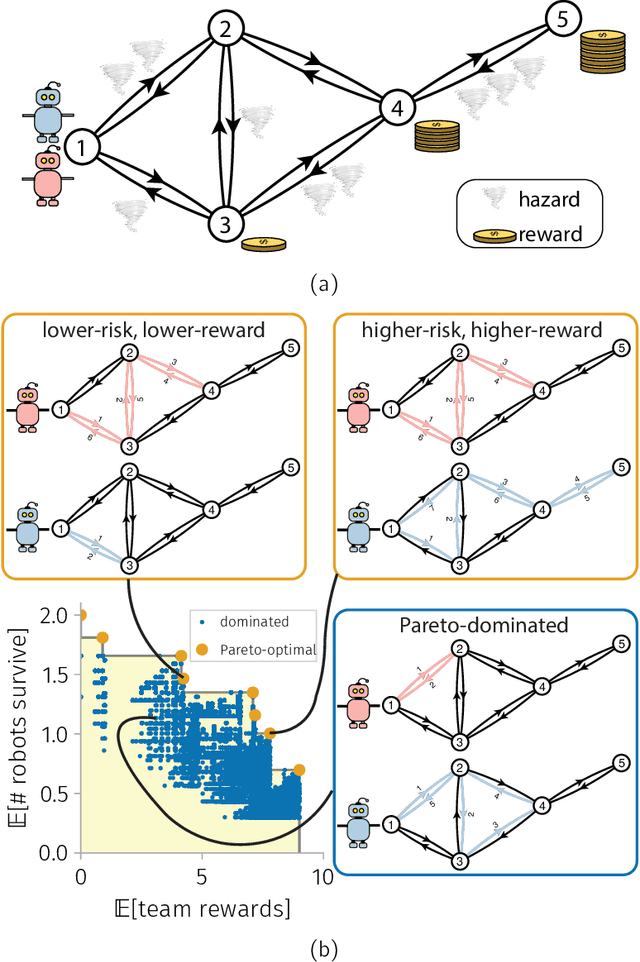
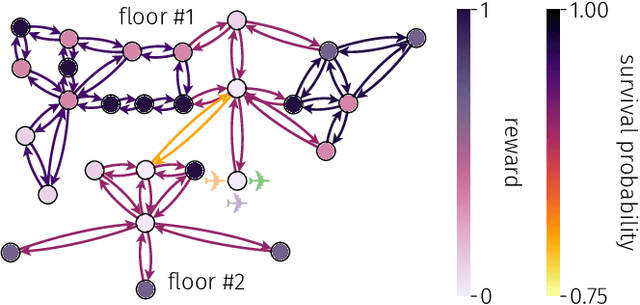
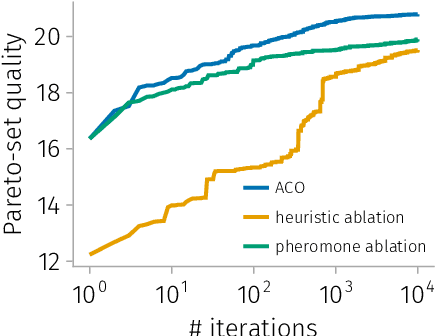
Teams of mobile [aerial, ground, or aquatic] robots have applications in resource delivery, patrolling, information-gathering, agriculture, forest fire fighting, chemical plume source localization and mapping, and search-and-rescue. Robot teams traversing hazardous environments -- with e.g. rough terrain or seas, strong winds, or adversaries capable of attacking or capturing robots -- should plan and coordinate their trails in consideration of risks of disablement, destruction, or capture. Specifically, the robots should take the safest trails, coordinate their trails to cooperatively achieve the team-level objective with robustness to robot failures, and balance the reward from visiting locations against risks of robot losses. Herein, we consider bi-objective trail-planning for a mobile team of robots orienteering in a hazardous environment. The hazardous environment is abstracted as a directed graph whose arcs, when traversed by a robot, present known probabilities of survival. Each node of the graph offers a reward to the team if visited by a robot (which e.g. delivers a good to or images the node). We wish to search for the Pareto-optimal robot-team trail plans that maximize two [conflicting] team objectives: the expected (i) team reward and (ii) number of robots that survive the mission. A human decision-maker can then select trail plans that balance, according to their values, reward and robot survival. We implement ant colony optimization, guided by heuristics, to search for the Pareto-optimal set of robot team trail plans. As a case study, we illustrate with an information-gathering mission in an art museum.