 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Path Finding on Strongly Connected Digraphs: feasibility and solution algorithms
Sep 09, 2022



On an assigned graph, the problem of Multi-Agent Pathfinding (MAPF) consists in finding paths for multiple agents, avoiding collisions. Finding the minimum-length solution is known to be NP-hard, and computation times grows exponentially with the number of agents. However, in industrial applications, it is important to find feasible, suboptimal solutions, in a time that grows polynomially with the number of agents. Such algorithms exist for undirected and biconnected directed graphs. Our main contribution is to generalize these algorithms to the more general case of strongly connected directed graphs. In particular, given a MAPF problem with at least two holes, we present an algorithm that checks the problem feasibility in linear time with respect to the number of nodes, and provides a feasible solution in polynomial time.
Globally Optimal Registration based on Fast Branch and Bound
Jan 28, 2019


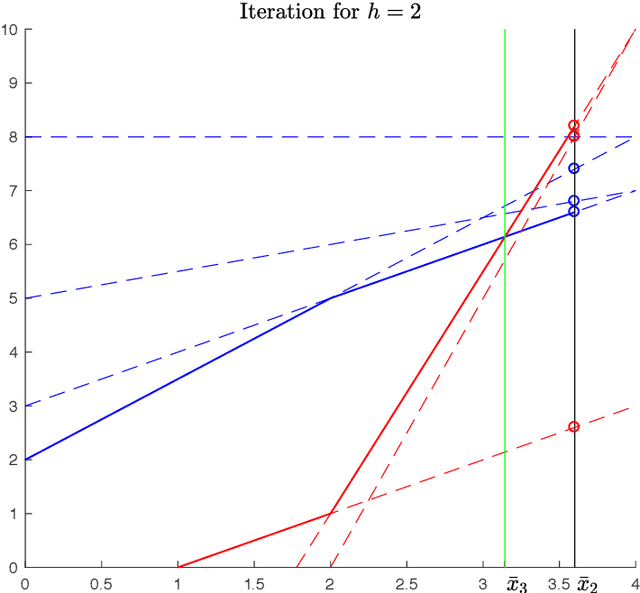
The problem of planar registration consists in finding the transformation that better aligns two point sets. In our setting, the search domain is the set of planar rigid transformations and the objective function is the sum of the distances between each point of the transformed source set and the destination set. We propose a novel Branch and Bound (BnB) method for finding the globally optimal solution. The algorithm recursively splits the search domain into boxes and computes an upper and a lower bound for the minimum value of the restricted problem. We present two main contributions. First, we define two lower bounds. The cheap bound consists of the sum of the minimum distances between each point of source point set, transformed according to current box, and all the candidate points in the destination point set. The relaxation bound corresponds to the solution of a concave relaxation of the objective function based on the linearization of the distance. In large boxes, the cheap bound is a better approximation of the function minimum, while, in small boxes, the relaxation bound is much more accurate. Second, we present a queue-based algorithm that considerably speeds up the computation.
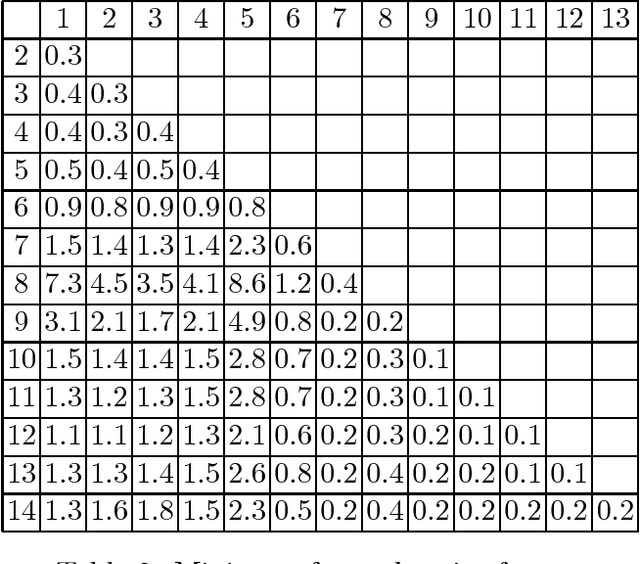
A fast speed planning algorithm for robotic manipulators
Oct 03, 2018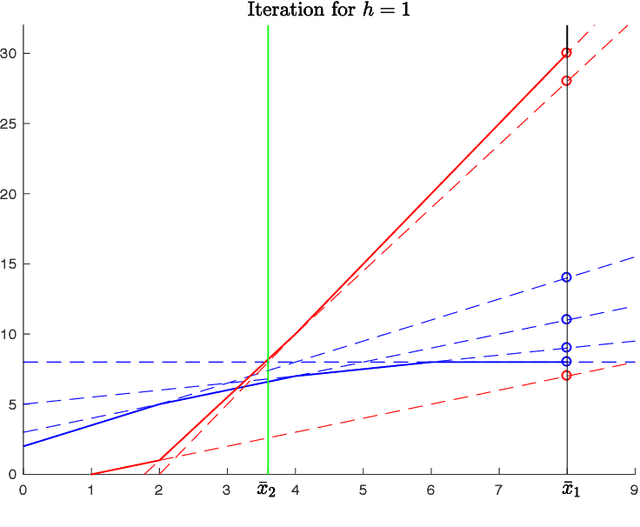
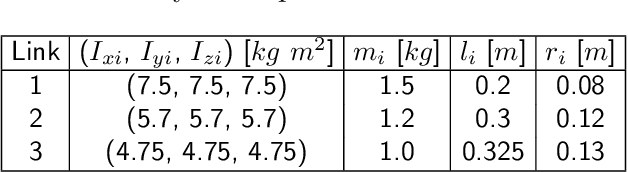
We consider the speed planning problem for a robotic manipulator. In particular, we present an algorithm for finding the time-optimal speed law along an assigned path that satisfies velocity and acceleration constraints and respects the maximum forces and torques allowed by the actuators. The addressed optimization problem is a finite dimensional reformulation of the continuous-time speed optimization problem, obtained by discretizing the speed profile with N points. The proposed algorithm has linear complexity with respect to N and to the number of degrees of freedom. Such complexity is the best possible for this problem. Numerical tests show that the proposed algorithm is significantly faster than algorithms already existing in literature.