 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
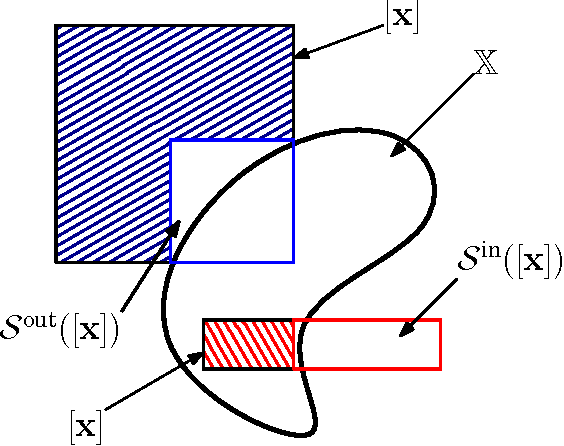
Add to EdgeInterval-based validation of a nonlinear estimator
Nov 26, 2024In engineering, models are often used to represent the behavior of a system. Estimators are then needed to approximate the values of the model's parameters based on observations. This approximation implies a difference between the values predicted by the model and the observations that have been made. It creates an uncertainty that can lead to dangerous decision making. Interval analysis tools can be used to guarantee some properties of an estimator, even when the estimator itself doesn't rely on interval analysis (Adam, 2019) (Adam, 2015). This paper contributes to this dynamic by proposing an interval-based and guaranteed method to validate a nonlinear estimator. It is based on the Moore-Skelboe algorithm (van Emden, 2004). This method returns a guaranteed maximum error that the estimator will never exceed. We will show that we can guarantee properties even when working with non-guaranteed estimators such as neural networks.
Modelisation of a rolling disk with Sympy
Nov 28, 2023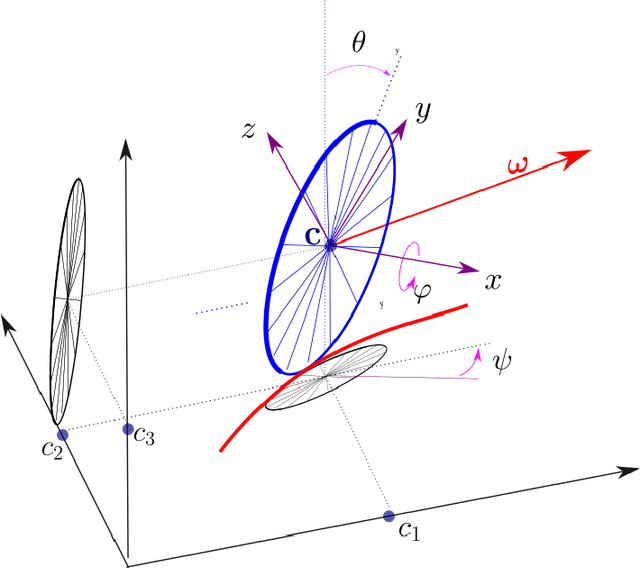



This paper proposes a Lagrangian approach to find the state equations of a disk rolling on a plane without friction. The approach takes advantage of a symbolic computation to simplify the reasoning.
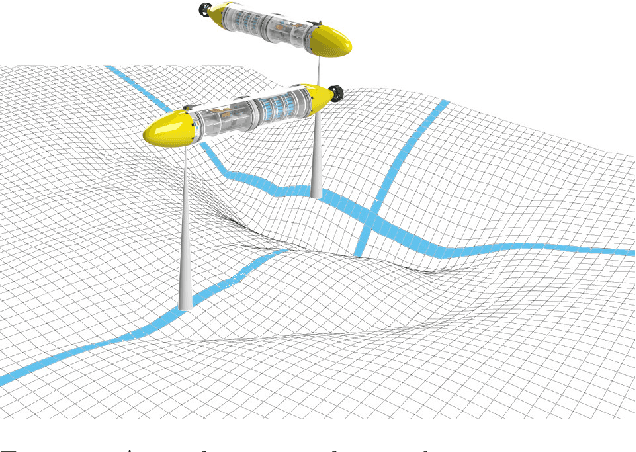
Estimating the Coverage Measure and the Area Explored by a Line-Sweep Sensor on the Plane
Sep 07, 2023This paper presents a method for determining the area explored by a line-sweep sensor during an area-covering mission in a two-dimensional plane. Accurate knowledge of the explored area is crucial for various applications in robotics, such as mapping, surveillance, and coverage optimization. The proposed method leverages the concept of coverage measure of the environment and its relation to the topological degree in the plane, to estimate the extent of the explored region. In addition, we extend the approach to uncertain coverage measure values using interval analysis. This last contribution allows for a guaranteed characterization of the explored area, essential considering the often critical character of area-covering missions. Finally, this paper also proposes a novel algorithm for computing the topological degree in the 2-dimensional plane, for all the points inside an area of interest, which differs from existing solutions that compute the topological degree for single points. The applicability of the method is evaluated through a real-world experiment.
Enclosing the Sliding Surfaces of a Controlled Swing
Jan 14, 2021


When implementing a non-continuous controller for a cyber-physical system, it may happen that the evolution of the closed-loop system is not anymore piecewise differentiable along the trajectory, mainly due to conditional statements inside the controller. This may lead to some unwanted chattering effects than may damage the system. This behavior is difficult to observe even in simulation. In this paper, we propose an interval approach to characterize the sliding surface which corresponds to the set of all states such that the state trajectory may jump indefinitely between two distinct behaviors. We show that the recent notion of thick sets will allows us to compute efficiently an outer approximation of the sliding surface of a given class of hybrid system taking into account all set-membership uncertainties. An application to the verification of the controller of a child swing is considered to illustrate the principle of the approach.
* In Proceedings SNR 2020, arXiv:2101.05256
Proving the existence of loops in robot trajectories
Dec 04, 2017


This paper presents a reliable method to verify the existence of loops along the uncertain trajectory of a robot, based on proprioceptive measurements only, within a bounded-error context. The loop closure detection is one of the key points in SLAM methods, especially in homogeneous environments with difficult scenes recognitions. The proposed approach is generic and could be coupled with conventional SLAM algorithms to reliably reduce their computing burden, thus improving the localization and mapping processes in the most challenging environments such as unexplored underwater extents. To prove that a robot performed a loop whatever the uncertainties in its evolution, we employ the notion of topological degree that originates in the field of differential topology. We show that a verification tool based on the topological degree is an optimal method for proving robot loops. This is demonstrated both on datasets from real missions involving autonomous underwater vehicles, and by a mathematical discussion.
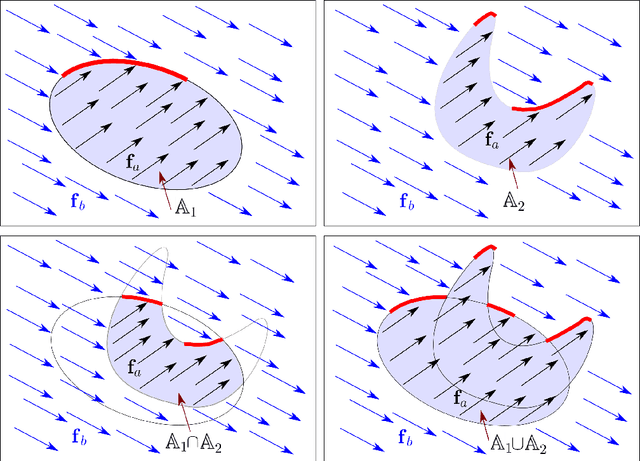
Minkowski Operations of Sets with Application to Robot Localization
Apr 11, 2017

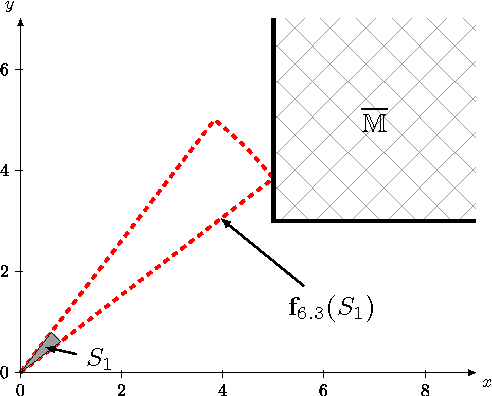
This papers shows that using separators, which is a pair of two complementary contractors, we can easily and efficiently solve the localization problem of a robot with sonar measurements in an unstructured environment. We introduce separators associated with the Minkowski sum and the Minkowski difference in order to facilitate the resolution. A test-case is given in order to illustrate the principle of the approach.
* In Proceedings SNR 2017, arXiv:1704.02421
Solving Composed First-Order Constraints from Discrete-Time Robust Control
May 11, 2001
This paper deals with a problem from discrete-time robust control which requires the solution of constraints over the reals that contain both universal and existential quantifiers. For solving this problem we formulate it as a program in a (fictitious) constraint logic programming language with explicit quantifier notation. This allows us to clarify the special structure of the problem, and to extend an algorithm for computing approximate solution sets of first-order constraints over the reals to exploit this structure. As a result we can deal with inputs that are clearly out of reach for current symbolic solvers.