Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous UAV Navigation Using Reinforcement Learning
Jan 16, 2018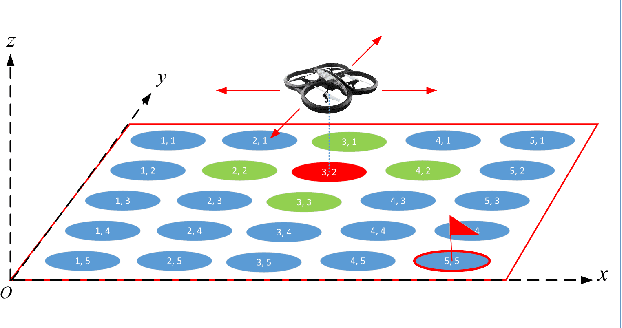
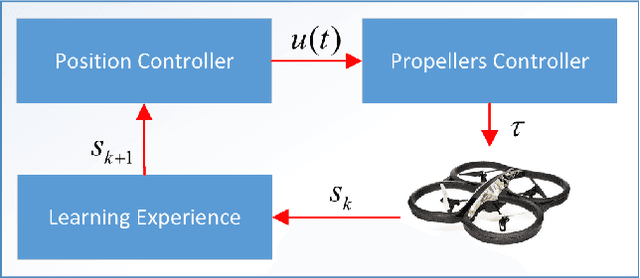
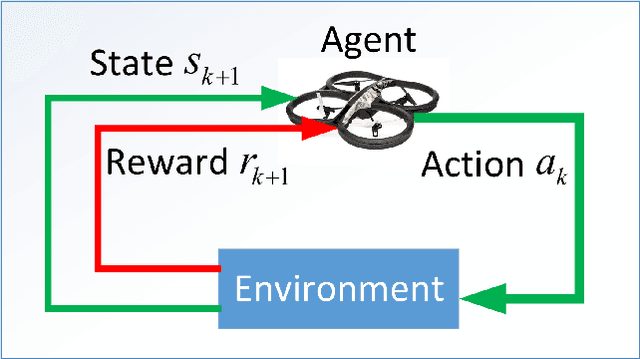
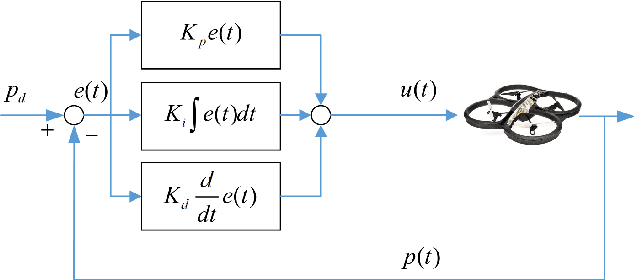
Unmanned aerial vehicles (UAV) are commonly used for missions in unknown environments, where an exact mathematical model of the environment may not be available. This paper provides a framework for using reinforcement learning to allow the UAV to navigate successfully in such environments. We conducted our simulation and real implementation to show how the UAVs can successfully learn to navigate through an unknown environment. Technical aspects regarding to applying reinforcement learning algorithm to a UAV system and UAV flight control were also addressed. This will enable continuing research using a UAV with learning capabilities in more important applications, such as wildfire monitoring, or search and rescue missions.
Via