 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Query Networks for Object Detection with Automotive Radar
Nov 19, 2025

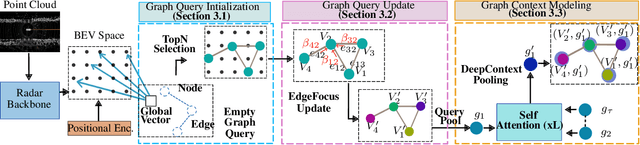

Object detection with 3D radar is essential for 360-degree automotive perception, but radar's long wavelengths produce sparse and irregular reflections that challenge traditional grid and sequence-based convolutional and transformer detectors. This paper introduces Graph Query Networks (GQN), an attention-based framework that models objects sensed by radar as graphs, to extract individualized relational and contextual features. GQN employs a novel concept of graph queries to dynamically attend over the bird's-eye view (BEV) space, constructing object-specific graphs processed by two novel modules: EdgeFocus for relational reasoning and DeepContext Pooling for contextual aggregation. On the NuScenes dataset, GQN improves relative mAP by up to +53%, including a +8.2% gain over the strongest prior radar method, while reducing peak graph construction overhead by 80% with moderate FLOPs cost.
AttentiveGRU: Recurrent Spatio-Temporal Modeling for Advanced Radar-Based BEV Object Detection
Apr 01, 2025Bird's-eye view (BEV) object detection has become important for advanced automotive 3D radar-based perception systems. However, the inherently sparse and non-deterministic nature of radar data limits the effectiveness of traditional single-frame BEV paradigms. In this paper, we addresses this limitation by introducing AttentiveGRU, a novel attention-based recurrent approach tailored for radar constraints, which extracts individualized spatio-temporal context for objects by dynamically identifying and fusing temporally correlated structures across present and memory states. By leveraging the consistency of object's latent representation over time, our approach exploits temporal relations to enrich feature representations for both stationary and moving objects, thereby enhancing detection performance and eliminating the need for externally providing or estimating any information about ego vehicle motion. Our experimental results on the public nuScenes dataset show a significant increase in mAP for the car category by 21% over the best radar-only submission. Further evaluations on an additional dataset demonstrate notable improvements in object detection capabilities, underscoring the applicability and effectiveness of our method.