 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAI Assisted Cervical Cancer Screening for Cytology Samples in Developing Countries
Apr 29, 2025Cervical cancer remains a significant health challenge, with high incidence and mortality rates, particularly in transitioning countries. Conventional Liquid-Based Cytology(LBC) is a labor-intensive process, requires expert pathologists and is highly prone to errors, highlighting the need for more efficient screening methods. This paper introduces an innovative approach that integrates low-cost biological microscopes with our simple and efficient AI algorithms for automated whole-slide analysis. Our system uses a motorized microscope to capture cytology images, which are then processed through an AI pipeline involving image stitching, cell segmentation, and classification. We utilize the lightweight UNet-based model involving human-in-the-loop approach to train our segmentation model with minimal ROIs. CvT-based classification model, trained on the SIPaKMeD dataset, accurately categorizes five cell types. Our framework offers enhanced accuracy and efficiency in cervical cancer screening compared to various state-of-art methods, as demonstrated by different evaluation metrics.
Design and Performance Comparison of FuzzyPID and Non-linear Model Predictive Controller for 4-Wheel Omni-drive Robot
Mar 11, 2024



Trajectory tracking for an Omni-drive robot presents a challenging task that demands an efficient controller design. To address the limitations of manual tuning, we introduce a self-optimizing controller named fuzzyPID, leveraging the analysis of responses from various dynamic and static systems. The rule-based controller design is implemented using Matlab/Simulink, and trajectory tracking simulations are conducted within the CoppeliaSim environment. Similarly, a non-linear model predictive controller(NMPC) is proposed to compare tracking performance with fuzzyPID. We also assess the impact of tunable parameters of NMPC on its tracking accuracy. Simulation results validate the precision and effectiveness of NMPC over fuzzyPID controller while trading computational complexity.
Cross-modal Contrastive Learning with Asymmetric Co-attention Network for Video Moment Retrieval
Dec 12, 2023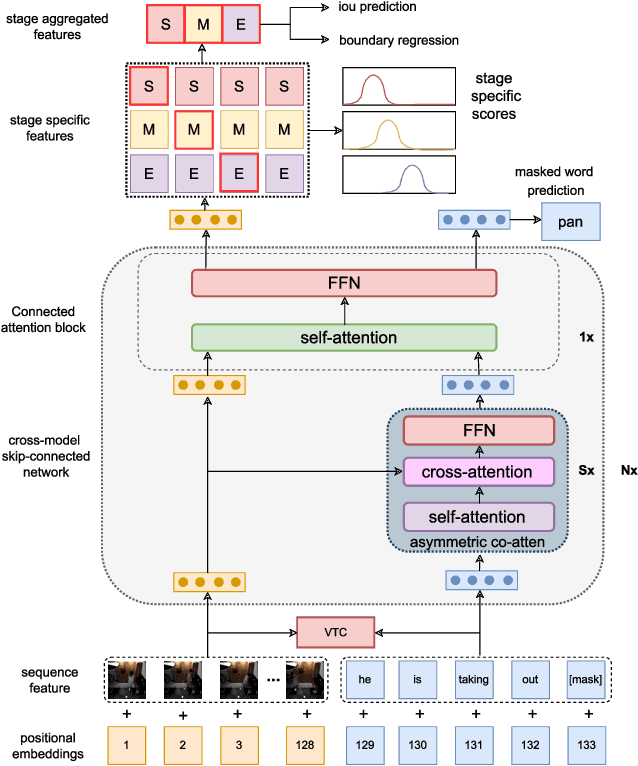
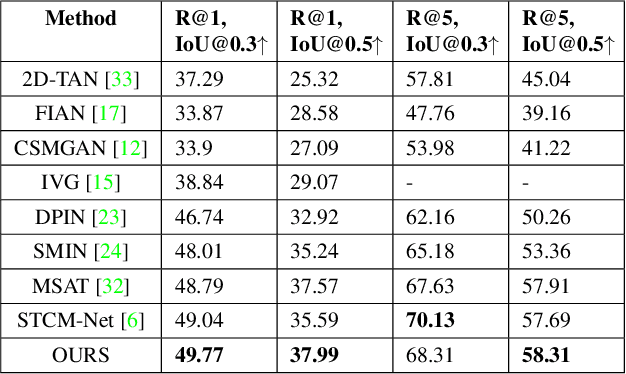
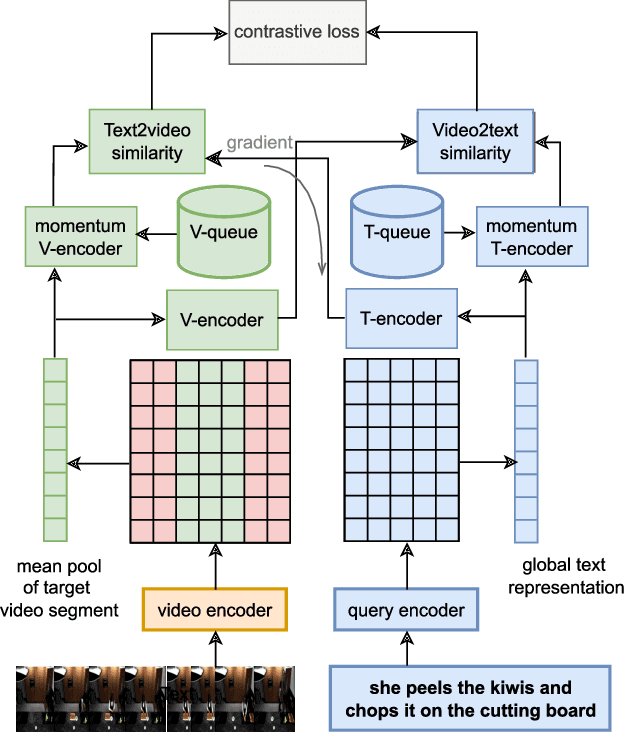
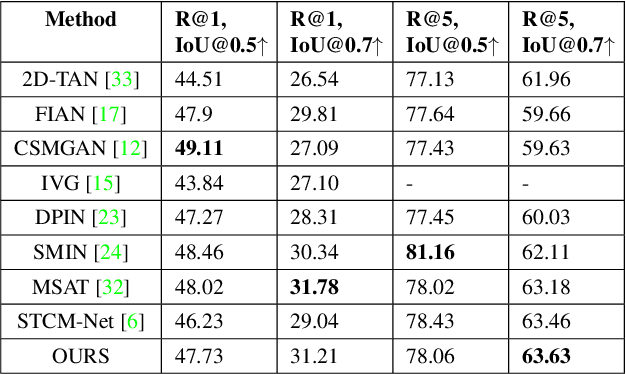
Video moment retrieval is a challenging task requiring fine-grained interactions between video and text modalities. Recent work in image-text pretraining has demonstrated that most existing pretrained models suffer from information asymmetry due to the difference in length between visual and textual sequences. We question whether the same problem also exists in the video-text domain with an auxiliary need to preserve both spatial and temporal information. Thus, we evaluate a recently proposed solution involving the addition of an asymmetric co-attention network for video grounding tasks. Additionally, we incorporate momentum contrastive loss for robust, discriminative representation learning in both modalities. We note that the integration of these supplementary modules yields better performance compared to state-of-the-art models on the TACoS dataset and comparable results on ActivityNet Captions, all while utilizing significantly fewer parameters with respect to baseline.