 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShare Price Prediction of Aerospace Relevant Companies with Recurrent Neural Networks based on PCA
Aug 26, 2020
The capital market plays a vital role in marketing operations for aerospace industry. However, due to the uncertainty and complexity of the stock market and many cyclical factors, the stock prices of listed aerospace companies fluctuate significantly. This makes the share price prediction challengeable. To improve the prediction of share price for aerospace industry sector and well understand the impact of various indicators on stock prices, we provided a hybrid prediction model by the combination of Principal Component Analysis (PCA) and Recurrent Neural Networks. We investigated two types of aerospace industries (manufacturer and operator). The experimental results show that PCA could improve both accuracy and efficiency of prediction. Various factors could influence the performance of prediction models, such as finance data, extracted features, optimisation algorithms, and parameters of the prediction model. The selection of features may depend on the stability of historical data: technical features could be the first option when the share price is stable, whereas fundamental features could be better when the share price has high fluctuation. The delays of RNN also depend on the stability of historical data for different types of companies. It would be more accurate through using short-term historical data for aerospace manufacturers, whereas using long-term historical data for aerospace operating airlines. The developed model could be an intelligent agent in an automatic stock prediction system, with which, the financial industry could make a prompt decision for their economic strategies and business activities in terms of predicted future share price, thus improving the return on investment. Currently, COVID-19 severely influences aerospace industries. The developed approach can be used to predict the share price of aerospace industries at post COVID-19 time.
Learning Features with Differentiable Closed-Form Solver for Tracking
Jun 25, 2019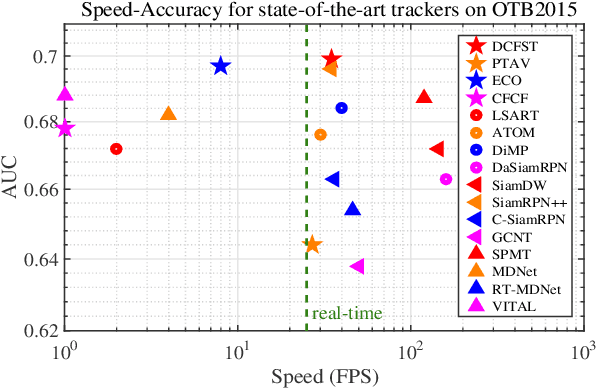
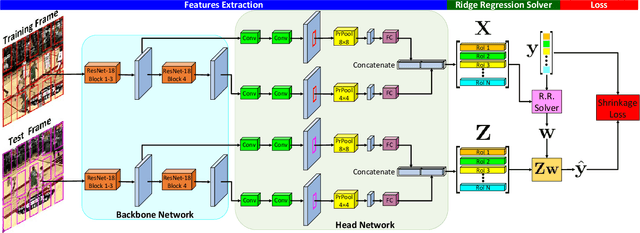
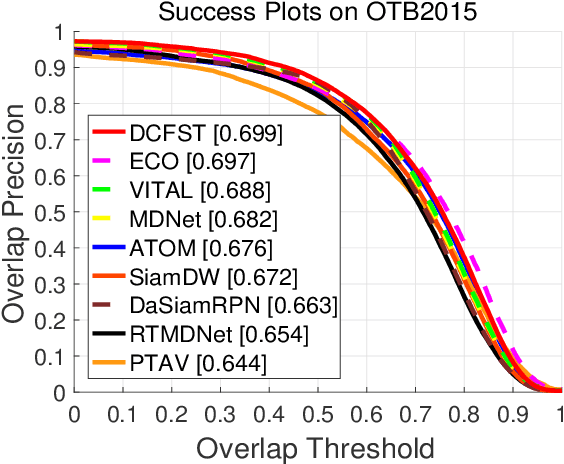

We present a novel and easy-to-implement training framework for visual tracking. Our approach mainly focuses on learning feature embeddings in an end-to-end way, which can generalize well to the trackers based on online discriminatively trained ridge regression model. This goal is efficiently achieved by taking advantage of the following two important theories. 1) Ridge regression problem has closed-form solution and is implicit differentiation under the optimality condition. Therefore, its solver can be embedded as a layer with efficient forward and backward processes in training deep convolutional neural networks. 2) Woodbury identity can be utilized to ensure efficient solution of ridge regression problem when the high-dimensional feature embeddings are employed. Moreover, in order to address the extreme foreground-background class imbalance during training, we modify the origin shrinkage loss and then employ it as the loss function for efficient and effective training. It is worth mentioning that the above core parts of our proposed training framework are easy to be implemented with several lines of code under the current popular deep learning frameworks, thus our approach is easy to be followed. Extensive experiments on six public benchmarks, OTB2015, NFS, TrackingNet, GOT10k, VOT2018, and VOT2019, show that the proposed tracker achieves state-of-the-art performance, while running at over 30 FPS. Code will be made available.
High Speed Kernelized Correlation Filters without Boundary Effect
Jul 10, 2018
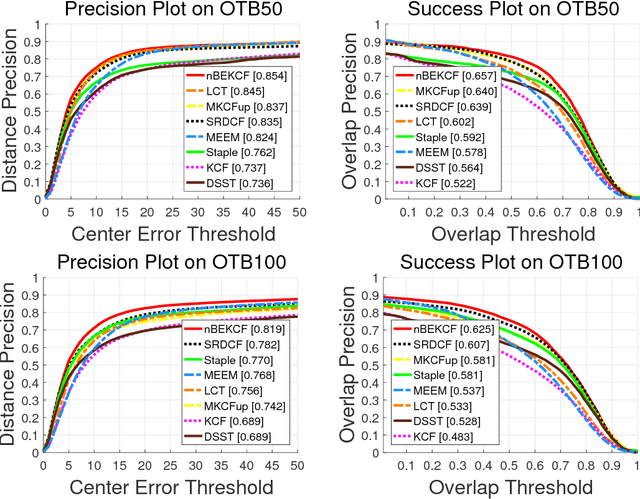

Recently, correlation filter based trackers (CF trackers) have attracted much attention in vision community because of their top performance in both location and speed. However, the boundary effect imposed by the periodic assumption for the efficient optimization seriously limits their location accuracy. Although there existed many modern works to relax the boundary effect of CF trackers, they all are not able to eliminate the boundary effect thoroughly as well as exploit the kernel trick to improve their location accuracy, and their speeds are reduced greatly. Either relaxing the boundary effect or being able to exploit kernel trick to improve the accuracy, and either relaxing the boundary effect or keeping CF trackers running at high speed have been two dilemmas in the society of visual tracking. To solve these problems, in this paper, we propose a high speed kernel correlation filter without the boundary effect (nBEKCF). Unlike all current CF trackers which exploited real and virtual image patches to train their regression functions, we construct a set of non-orthogonal bases with a group of circulant basic samples and utilize a function defined in Hilbert space and a set of densely sampled, totally real patches to regress a Gaussian goal. This way, the boundary effect is eliminated thoroughly in theory and the kernel trick can be employed naturally. To ensure nBEKCF runs at high speed, we present two efficient algorithms, ACSII and CCIM, to significantly accelerate the evaluation of kernel matrix without employing FFT. By exploiting the circulant structure of basic samples, the efficiency of CCIM in evaluating correlation exceeds that of FFT remarkably. Preliminary experimental results on two public datasets, OTB2013 and OTB2015, show that, without bells and whistles, nBEKCF outperforms representative trackers with hand-crafted features, in the meanwhile, runs at 70 fps on average.
On the Relations of Correlation Filter Based Trackers and Struck
Nov 25, 2017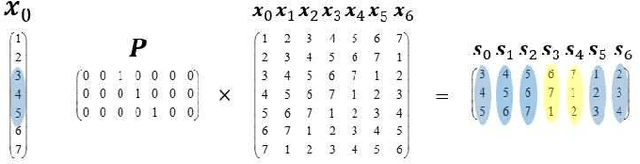
In recent years, two types of trackers, namely correlation filter based tracker (CF tracker) and structured output tracker (Struck), have exhibited the state-of-the-art performance. However, there seems to be lack of analytic work on their relations in the computer vision community. In this paper, we investigate two state-of-the-art CF trackers, i.e., spatial regularization discriminative correlation filter (SRDCF) and correlation filter with limited boundaries (CFLB), and Struck, and reveal their relations. Specifically, after extending the CFLB to its multiple channel version we prove the relation between SRDCF and CFLB on the condition that the spatial regularization factor of SRDCF is replaced by the masking matrix of CFLB. We also prove the asymptotical approximate relation between SRDCF and Struck on the conditions that the spatial regularization factor of SRDCF is replaced by an indicator function of object bounding box, the weights of SRDCF in its loss item are replaced by those of Struck, the linear kernel is employed by Struck, and the search region tends to infinity. Extensive experiments on public benchmarks OTB50 and OTB100 are conducted to verify our theoretical results. Moreover, we explain how detailed differences among SRDCF, CFLB, and Struck would give rise to slightly different performances on visual sequences