 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstrained Reinforcement Learning for Safe Heat Pump Control
Sep 29, 2024



Constrained Reinforcement Learning (RL) has emerged as a significant research area within RL, where integrating constraints with rewards is crucial for enhancing safety and performance across diverse control tasks. In the context of heating systems in the buildings, optimizing the energy efficiency while maintaining the residents' thermal comfort can be intuitively formulated as a constrained optimization problem. However, to solve it with RL may require large amount of data. Therefore, an accurate and versatile simulator is favored. In this paper, we propose a novel building simulator I4B which provides interfaces for different usages and apply a model-free constrained RL algorithm named constrained Soft Actor-Critic with Linear Smoothed Log Barrier function (CSAC-LB) to the heating optimization problem. Benchmarking against baseline algorithms demonstrates CSAC-LB's efficiency in data exploration, constraint satisfaction and performance.
Constrained Reinforcement Learning with Smoothed Log Barrier Function
Mar 21, 2024Reinforcement Learning (RL) has been widely applied to many control tasks and substantially improved the performances compared to conventional control methods in many domains where the reward function is well defined. However, for many real-world problems, it is often more convenient to formulate optimization problems in terms of rewards and constraints simultaneously. Optimizing such constrained problems via reward shaping can be difficult as it requires tedious manual tuning of reward functions with several interacting terms. Recent formulations which include constraints mostly require a pre-training phase, which often needs human expertise to collect data or assumes having a sub-optimal policy readily available. We propose a new constrained RL method called CSAC-LB (Constrained Soft Actor-Critic with Log Barrier Function), which achieves competitive performance without any pre-training by applying a linear smoothed log barrier function to an additional safety critic. It implements an adaptive penalty for policy learning and alleviates the numerical issues that are known to complicate the application of the log barrier function method. As a result, we show that with CSAC-LB, we achieve state-of-the-art performance on several constrained control tasks with different levels of difficulty and evaluate our methods in a locomotion task on a real quadruped robot platform.
Deep Reinforcement Learning for Heat Pump Control
Dec 24, 2022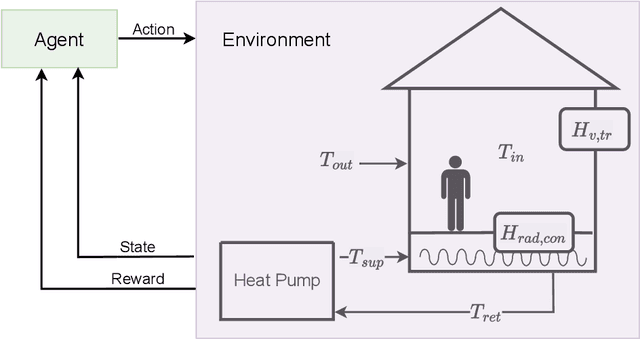
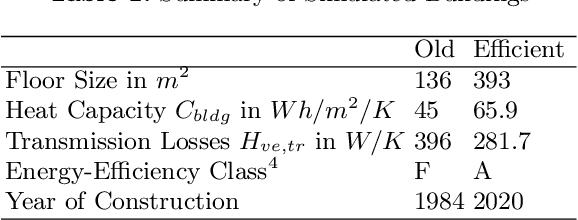
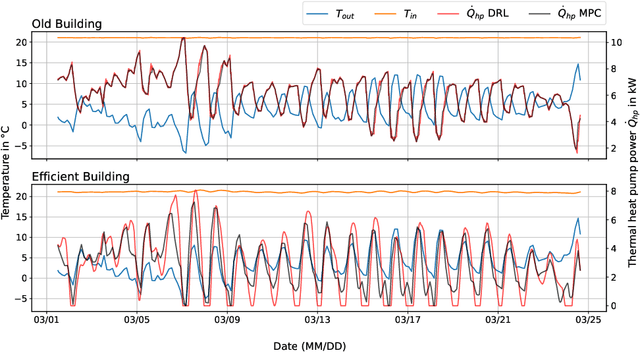

Heating in private households is a major contributor to the emissions generated today. Heat pumps are a promising alternative for heat generation and are a key technology in achieving our goals of the German energy transformation and to become less dependent on fossil fuels. Today, the majority of heat pumps in the field are controlled by a simple heating curve, which is a naive mapping of the current outdoor temperature to a control action. A more advanced control approach is model predictive control (MPC) which was applied in multiple research works to heat pump control. However, MPC is heavily dependent on the building model, which has several disadvantages. Motivated by this and by recent breakthroughs in the field, this work applies deep reinforcement learning (DRL) to heat pump control in a simulated environment. Through a comparison to MPC, it could be shown that it is possible to apply DRL in a model-free manner to achieve MPC-like performance. This work extends other works which have already applied DRL to building heating operation by performing an in-depth analysis of the learned control strategies and by giving a detailed comparison of the two state-of-the-art control methods.