 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDefect Detection Network In PCB Circuit Devices Based on GAN Enhanced YOLOv11
Jan 12, 2025This study proposes an advanced method for surface defect detection in printed circuit boards (PCBs) using an improved YOLOv11 model enhanced with a generative adversarial network (GAN). The approach focuses on identifying six common defect types: missing hole, rat bite, open circuit, short circuit, burr, and virtual welding. By employing GAN to generate synthetic defect images, the dataset is augmented with diverse and realistic patterns, improving the model's ability to generalize, particularly for complex and infrequent defects like burrs. The enhanced YOLOv11 model is evaluated on a PCB defect dataset, demonstrating significant improvements in accuracy, recall, and robustness, especially when dealing with defects in complex environments or small targets. This research contributes to the broader field of electronic design automation (EDA), where efficient defect detection is a crucial step in ensuring high-quality PCB manufacturing. By integrating advanced deep learning techniques, this approach enhances the automation and precision of defect detection, reducing reliance on manual inspection and accelerating design-to-production workflows. The findings underscore the importance of incorporating GAN-based data augmentation and optimized detection architectures in EDA processes, providing valuable insights for improving reliability and efficiency in PCB defect detection within industrial applications.
Research on vehicle detection based on improved YOLOv8 network
Dec 31, 2024
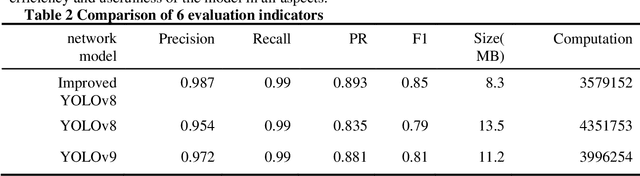
The key to ensuring the safe obstacle avoidance function of autonomous driving systems lies in the use of extremely accurate vehicle recognition techniques. However, the variability of the actual road environment and the diverse characteristics of vehicles and pedestrians together constitute a huge obstacle to improving detection accuracy, posing a serious challenge to the realization of this goal. To address the above issues, this paper proposes an improved YOLOv8 vehicle detection method. Specifically, taking the YOLOv8n-seg model as the base model, firstly, the FasterNet network is used to replace the backbone network to achieve the purpose of reducing the computational complexity and memory while improving the detection accuracy and speed; secondly, the feature enhancement is achieved by adding the attention mechanism CBAM to the Neck; and lastly, the loss function CIoU is modified to WIoU, which optimizes the detection box localization while improving the segmentation accuracy. The results show that the improved model achieves 98.3%, 89.1% and 88.4% detection accuracy for car, Person and Motorcycle. Compared with the pre-improvement and YOLOv9 models in six metrics such as Precision.