 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVideo-based Surgical Tool-tip and Keypoint Tracking using Multi-frame Context-driven Deep Learning Models
Jan 30, 2025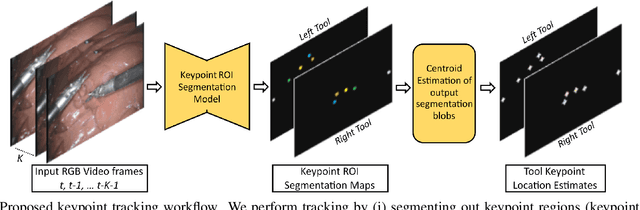
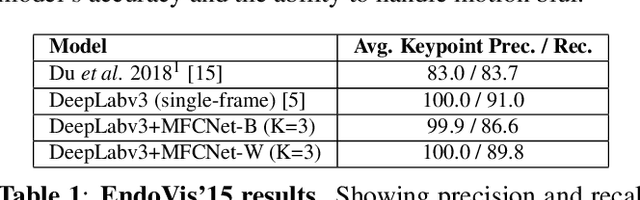
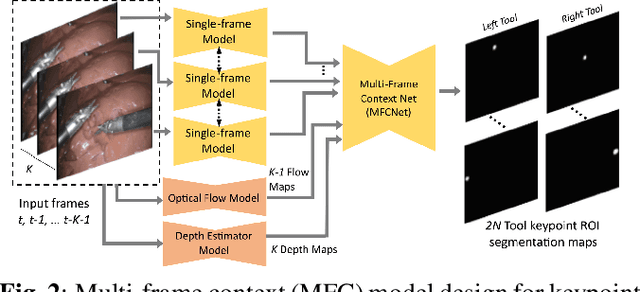
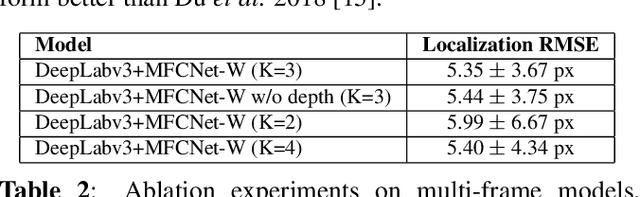
Automated tracking of surgical tool keypoints in robotic surgery videos is an essential task for various downstream use cases such as skill assessment, expertise assessment, and the delineation of safety zones. In recent years, the explosion of deep learning for vision applications has led to many works in surgical instrument segmentation, while lesser focus has been on tracking specific tool keypoints, such as tool tips. In this work, we propose a novel, multi-frame context-driven deep learning framework to localize and track tool keypoints in surgical videos. We train and test our models on the annotated frames from the 2015 EndoVis Challenge dataset, resulting in state-of-the-art performance. By leveraging sophisticated deep learning models and multi-frame context, we achieve 90\% keypoint detection accuracy and a localization RMS error of 5.27 pixels. Results on a self-annotated JIGSAWS dataset with more challenging scenarios also show that the proposed multi-frame models can accurately track tool-tip and tool-base keypoints, with ${<}4.2$-pixel RMS error overall. Such a framework paves the way for accurately tracking surgical instrument keypoints, enabling further downstream use cases. Project and dataset webpage: https://tinyurl.com/mfc-tracker