 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProtoSeg: A Prototype-Based Point Cloud Instance Segmentation Method
Oct 03, 2024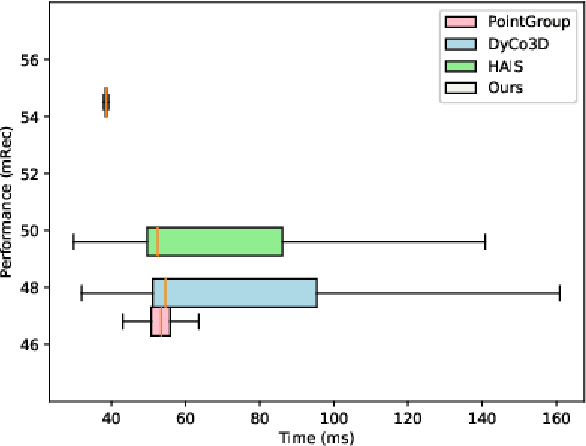
3D instance segmentation is crucial for obtaining an understanding of a point cloud scene. This paper presents a novel neural network architecture for performing instance segmentation on 3D point clouds. We propose to jointly learn coefficients and prototypes in parallel which can be combined to obtain the instance predictions. The coefficients are computed using an overcomplete set of sampled points with a novel multi-scale module, dubbed dilated point inception. As the set of obtained instance mask predictions is overcomplete, we employ a non-maximum suppression algorithm to retrieve the final predictions. This approach allows to omit the time-expensive clustering step and leads to a more stable inference time. The proposed method is not only 28% faster than the state-of-the-art, it also exhibits the lowest standard deviation. Our experiments have shown that the standard deviation of the inference time is only 1.0% of the total time while it ranges between 10.8 and 53.1% for the state-of-the-art methods. Lastly, our method outperforms the state-of-the-art both on S3DIS-blocks (4.9% in mRec on Fold-5) and PartNet (2.0% on average in mAP).
Improved Block Merging for 3D Point Cloud Instance Segmentation
Jul 09, 2024

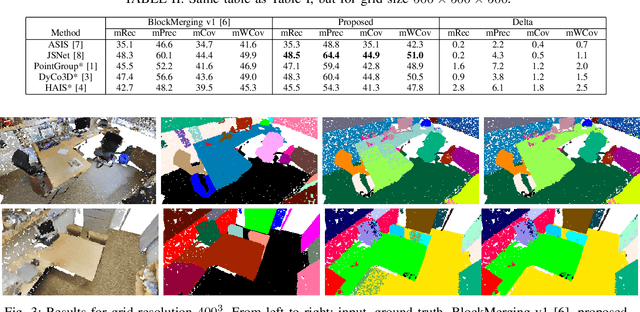
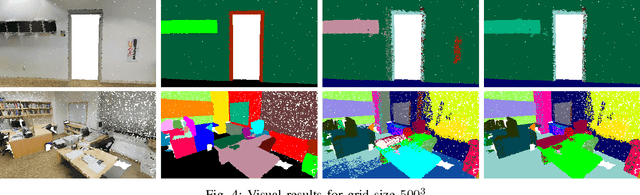
This paper proposes a novel block merging algorithm suitable for any block-based 3D instance segmentation technique. The proposed work improves over the state-of-the-art by allowing wrongly labelled points of already processed blocks to be corrected through label propagation. By doing so, instance overlap between blocks is not anymore necessary to produce the desirable results, which is the main limitation of the current art. Our experiments show that the proposed block merging algorithm significantly and consistently improves the obtained accuracy for all evaluation metrics employed in literature, regardless of the underlying network architecture.
* Published at 2023 24th International Conference on Digital Signal Processing (DSP)
Joint prototype and coefficient prediction for 3D instance segmentation
Jul 09, 2024



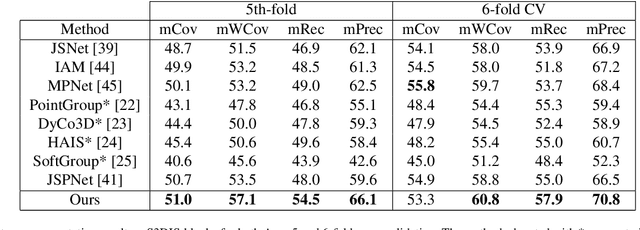
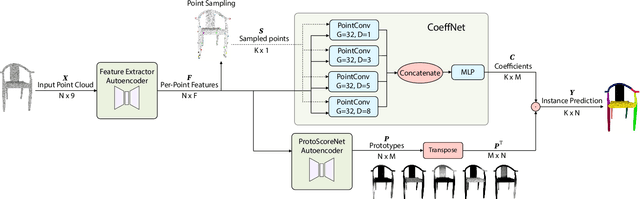
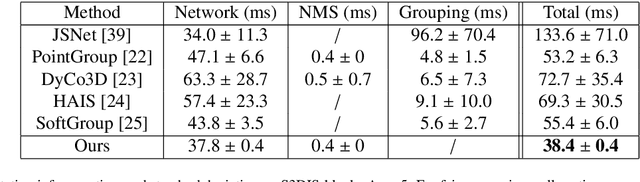
3D instance segmentation is crucial for applications demanding comprehensive 3D scene understanding. In this paper, we introduce a novel method that simultaneously learns coefficients and prototypes. Employing an overcomplete sampling strategy, our method produces an overcomplete set of instance predictions, from which the optimal ones are selected through a Non-Maximum Suppression (NMS) algorithm during inference. The obtained prototypes are visualizable and interpretable. Our method demonstrates superior performance on S3DIS-blocks, consistently outperforming existing methods in mRec and mPrec. Moreover, it operates 32.9% faster than the state-of-the-art. Notably, with only 0.8% of the total inference time, our method exhibits an over 20-fold reduction in the variance of inference time compared to existing methods. These attributes render our method well-suited for practical applications requiring both rapid inference and high reliability.
* Published in Electronics Letters