 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExtracting triples from dialogues for conversational social agents
Dec 24, 2024Obtaining an explicit understanding of communication within a Hybrid Intelligence collaboration is essential to create controllable and transparent agents. In this paper, we describe a number of Natural Language Understanding models that extract explicit symbolic triples from social conversation. Triple extraction has mostly been developed and tested for Knowledge Base Completion using Wikipedia text and data for training and testing. However, social conversation is very different as a genre in which interlocutors exchange information in sequences of utterances that involve statements, questions, and answers. Phenomena such as co-reference, ellipsis, coordination, and implicit and explicit negation or confirmation are more prominent in conversation than in Wikipedia text. We therefore describe an attempt to fill this gap by releasing data sets for training and testing triple extraction from social conversation. We also created five triple extraction models and tested them in our evaluation data. The highest precision is 51.14 for complete triples and 69.32 for triple elements when tested on single utterances. However, scores for conversational triples that span multiple turns are much lower, showing that extracting knowledge from true conversational data is much more challenging.
Leolani: a reference machine with a theory of mind for social communication
Jun 05, 2018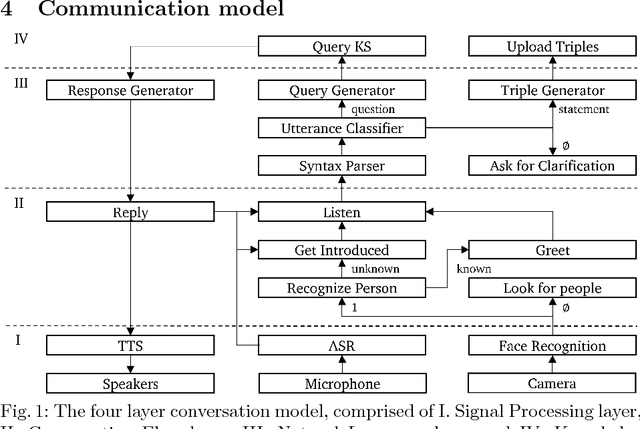
Our state of mind is based on experiences and what other people tell us. This may result in conflicting information, uncertainty, and alternative facts. We present a robot that models relativity of knowledge and perception within social interaction following principles of the theory of mind. We utilized vision and speech capabilities on a Pepper robot to build an interaction model that stores the interpretations of perceptions and conversations in combination with provenance on its sources. The robot learns directly from what people tell it, possibly in relation to its perception. We demonstrate how the robot's communication is driven by hunger to acquire more knowledge from and on people and objects, to resolve uncertainties and conflicts, and to share awareness of the per- ceived environment. Likewise, the robot can make reference to the world and its knowledge about the world and the encounters with people that yielded this knowledge.