 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeolani: a reference machine with a theory of mind for social communication
Jun 05, 2018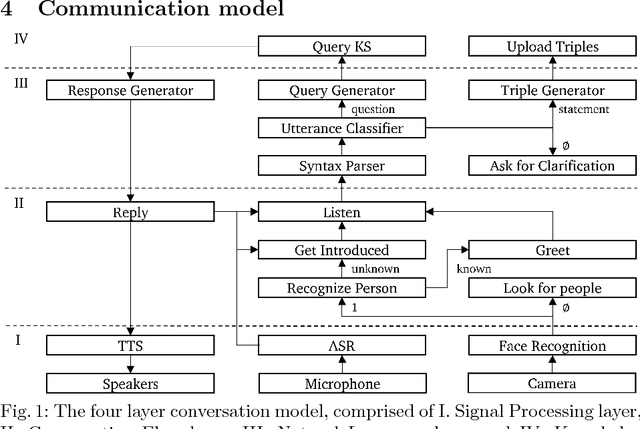
Our state of mind is based on experiences and what other people tell us. This may result in conflicting information, uncertainty, and alternative facts. We present a robot that models relativity of knowledge and perception within social interaction following principles of the theory of mind. We utilized vision and speech capabilities on a Pepper robot to build an interaction model that stores the interpretations of perceptions and conversations in combination with provenance on its sources. The robot learns directly from what people tell it, possibly in relation to its perception. We demonstrate how the robot's communication is driven by hunger to acquire more knowledge from and on people and objects, to resolve uncertainties and conflicts, and to share awareness of the per- ceived environment. Likewise, the robot can make reference to the world and its knowledge about the world and the encounters with people that yielded this knowledge.
Predicting opponent team activity in a RoboCup environment
Mar 04, 2015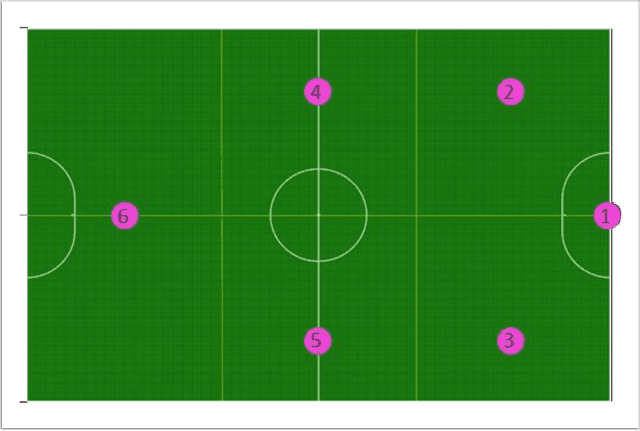
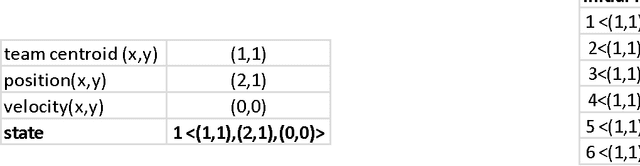
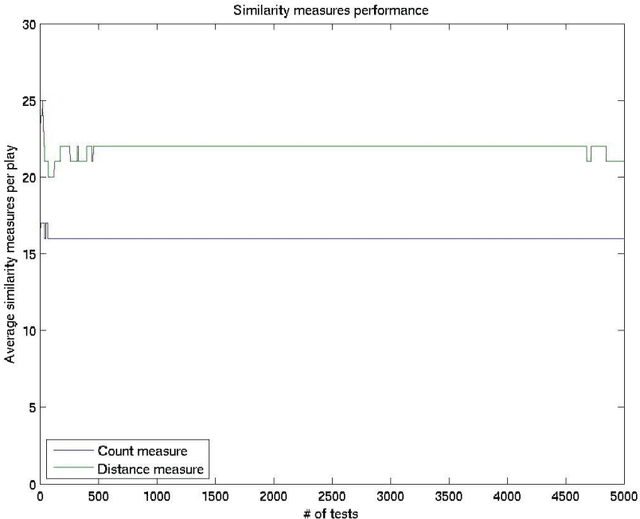
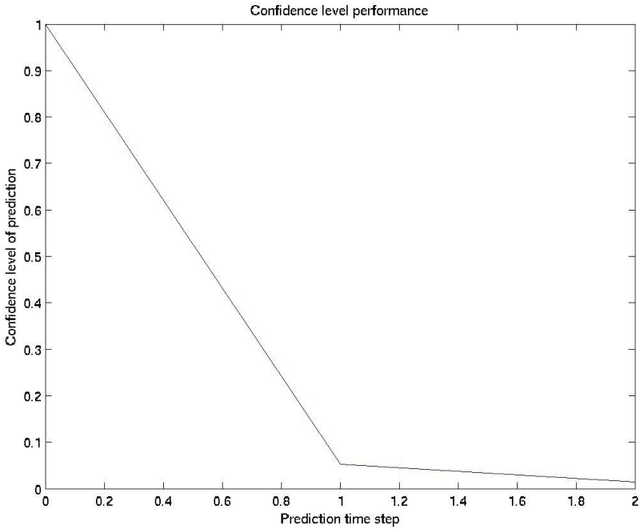
The goal of this project is to predict the opponent's configuration in a RoboCup SSL environment. For simplicity, a Markov model assumption is made such that the predicted formation of the opponent team only depends on its current formation. The field is divided into a grid and a robot state per player is created with information about its position and its velocity. To gather a more general sense of what the opposing team is doing, the state also incorporates the team's average position (centroid). All possible state transitions are stored in a hash table that requires minimum storage space. The table is populated with transition probabilities that are learned by reading vision packages and counting the state transitions regardless of the specific robot player. Therefore, the computation during the game is reduced to interpreting a given vision package to assign each player to a state, and looking for the most likely state it will transition to. The confidence of the predicted team's formation is the product of each individual player's probability. The project is noteworthy in that it minimizes the time and space complexity requirements for opponent's moves prediction.