 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Deformable-Contact-Aware Model Predictive Control for Force-Modulated Manipulation
Dec 19, 2022



Force modulation of robotic manipulators has been extensively studied for several decades. However, it is not yet commonly used in safety-critical applications due to a lack of accurate interaction contact modeling and weak performance guarantees - a large proportion of them concerning the modulation of interaction forces. This study presents a high-level framework for simultaneous trajectory optimization and force control of the interaction between a manipulator and soft environments, which is prone to external disturbances. Sliding friction and normal contact force are taken into account. The dynamics of the soft contact model and the manipulator are simultaneously incorporated in a trajectory optimizer to generate desired motion and force profiles. A constrained optimization framework based on Alternative Direction Method of Multipliers (ADMM) has been employed to efficiently generate real-time optimal control inputs and high-dimensional state trajectories in a Model Predictive Control fashion. Experimental validation of the model performance is conducted on a soft substrate with known material properties using a Cartesian space force control mode. Results show a comparison of ground truth and real-time model-based contact force and motion tracking for multiple Cartesian motions in the valid range of the friction model. It is shown that a contact model-based motion planner can compensate for frictional forces and motion disturbances and improve the overall motion and force tracking accuracy. The proposed high-level planner has the potential to facilitate the automation of medical tasks involving the manipulation of compliant, delicate, and deformable tissues.
Design-Informed Kinematic Control for Improved Dexterous Teleoperation of a Bilateral Manipulator System
May 02, 2020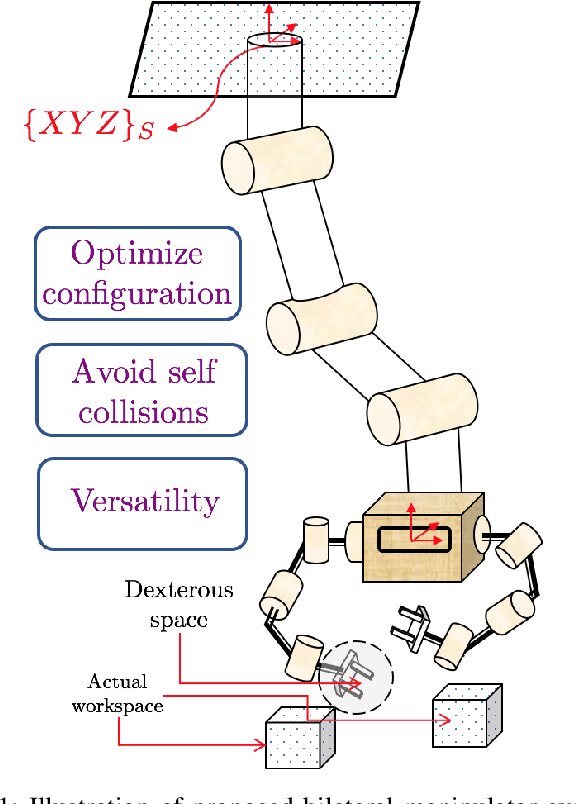
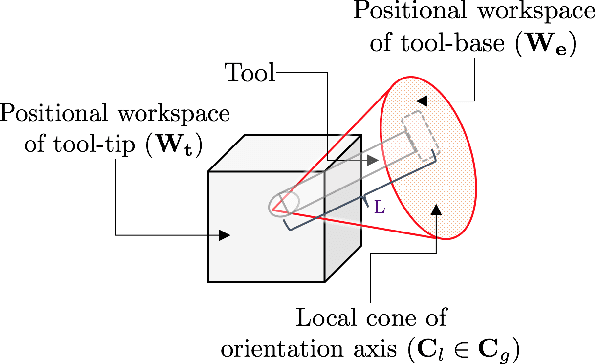
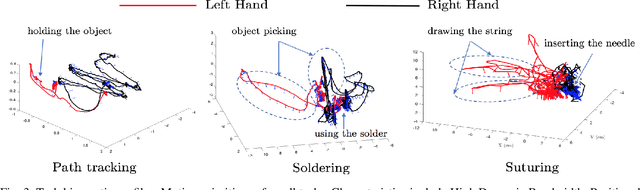
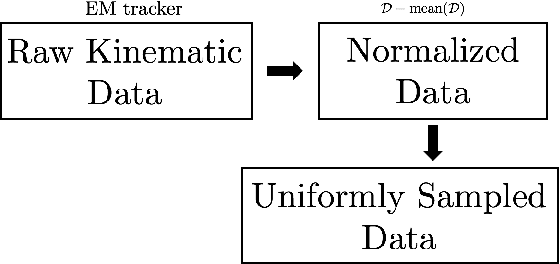
This paper explores the possibility of improving bilateral robot manipulation task performance through optimizing the robot morphology and configuration of the system through motion. To optimize the design for different scenarios, we select a set of tasks that represent the variability in small scale manipulation (e.g. pick and place, tasks involving positioning and orientation) and track the motion to obtain a reproducible trajectory. Kinematic data is captured through an electromagnetic (EM) tracker system while a human subject performs the tasks. Then, the data is pre-processed and used to optimize the morphology of each symmetric robot arm of the bilateral system. Once optimized, a kinematic control scheme is used to generate a motion with dexterous configurations. The dexterity is evaluated along the trajectories with standard dexterity metrics. Results show a 10\% improvement in dexterous maneuverability with the optimized arm design and optimal base configuration.
Simultaneous Trajectory Optimization and Force Control with Soft Contact Mechanics
Apr 21, 2020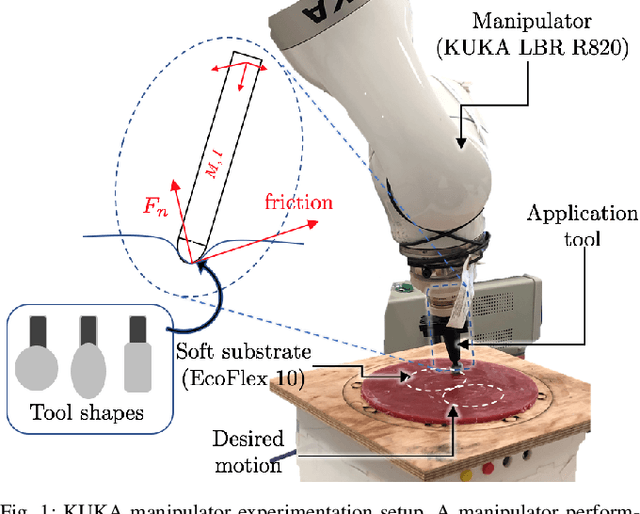
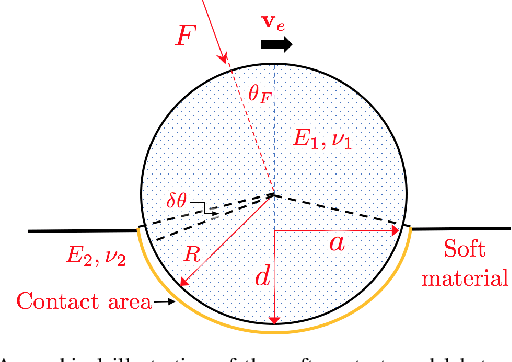
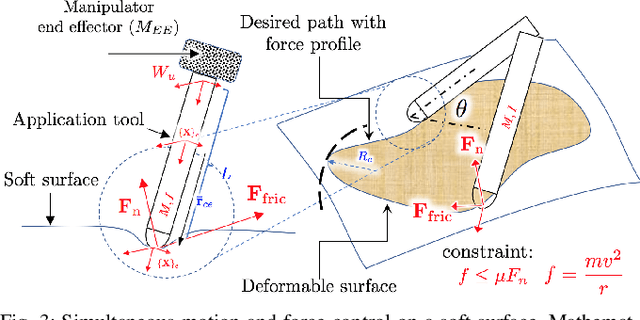

Force modulation of robotic manipulators has been extensively studied for several decades but is not yet commonly used in safety-critical applications due to a lack of accurate interaction contact modeling and weak performance guarantees - a large proportion of them concerning the modulation of interaction forces. This study presents a high-level framework for simultaneous trajectory optimization and force control of the interaction between manipulator and soft environments. Sliding friction and normal contact force are taken into account. The dynamics of the soft contact model and the manipulator dynamics are simultaneously incorporated in the trajectory optimizer to generate desired motion and force profiles. A constraint optimization framework based on Differential Dynamic Programming and Alternative Direction Method of Multipliers has been employed to generate optimal control input and high-dimensional state trajectories. Experimental validation of the model performance is conducted on a soft substrate with known material properties using Cartesian space force control mode. Results show a comparison of ground truth and predicted model based contact force states for a few cartesian motions and the validity range of the friction model. Potential applications include high-level task planning of medical tasks involving manipulation of compliant, delicate, and deformable tissues.
Identification of Compliant Contact Parameters and Admittance Force Modulation on a Non-stationary Compliant Surface
Apr 21, 2020
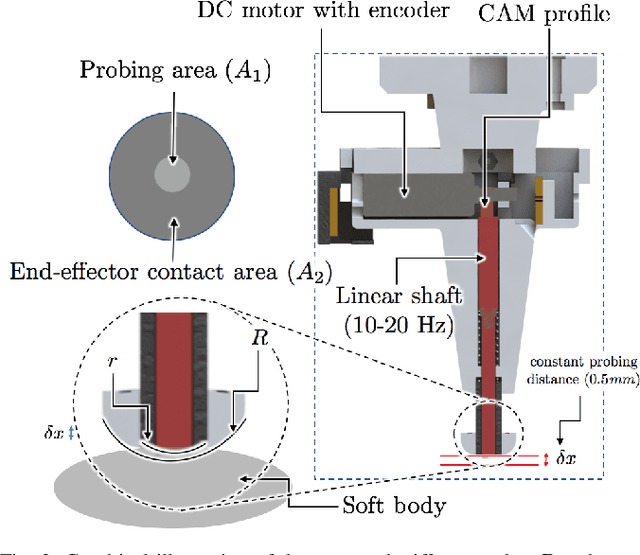

Although autonomous control of robotic manipulators has been studied for several decades, they are not commonly used in safety-critical applications due to lack of safety and performance guarantees - many of them concerning the modulation of interaction forces. This paper presents a mechanical probing strategy for estimating the environmental impedance parameters of compliant environments, independent a manipulator's controller design, and configuration. The parameter estimates are used in a position-based adaptive force controller to enable control of interaction forces in compliant, stationary, and non-stationary environments. This approach is targeted for applications where the workspace is constrained and non-stationary, and where force control is critical to task success. These applications include surgical tasks involving manipulation of compliant, delicate, moving tissues. Results show fast parameter estimation and successful force modulation that compensates for motion.