 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCubic Range Error Model for Stereo Vision with Illuminators
Mar 11, 2018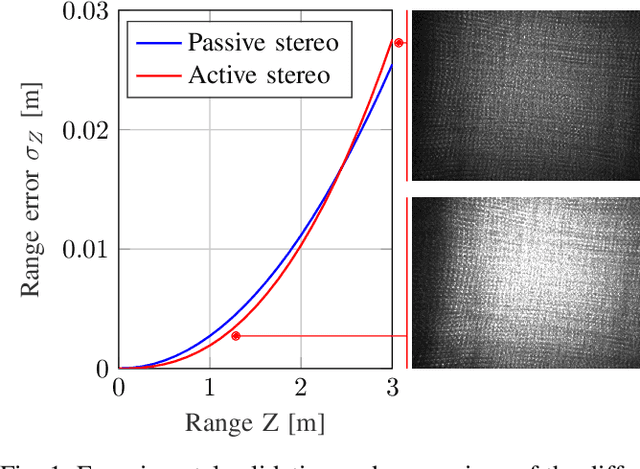
Use of low-cost depth sensors, such as a stereo camera setup with illuminators, is of particular interest for numerous applications ranging from robotics and transportation to mixed and augmented reality. The ability to quantify noise is crucial for these applications, e.g., when the sensor is used for map generation or to develop a sensor scheduling policy in a multi-sensor setup. Range error models provide uncertainty estimates and help weigh the data correctly in instances where range measurements are taken from different vantage points or with different sensors. The weighing is important to fuse range data into a map in a meaningful way, i.e., the high confidence data is relied on most heavily. Such a model is derived in this work. We show that the range error for stereo systems with integrated illuminators is cubic and validate the proposed model experimentally with an off-the-shelf structured light stereo system. The experiments confirm the validity of the model and simplify the application of this type of sensor in robotics. The proposed error model is relevant to any stereo system with low ambient light where the main light source is located at the camera system. Among others, this is the case for structured light stereo systems and night stereo systems with headlights. In this work, we propose that the range error is cubic in range for stereo systems with integrated illuminators. Experimental validation with an off-the-shelf structured light stereo system shows that the exponent is between 2.4 and 2.6. The deviation is attributed to our model considering only shot noise.