 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStackelberg Game-Theoretic Learning for Collaborative Assembly Task Planning
Apr 19, 2024



As assembly tasks grow in complexity, collaboration among multiple robots becomes essential for task completion. However, centralized task planning has become inadequate for adapting to the increasing intelligence and versatility of robots, along with rising customized orders. There is a need for efficient and automated planning mechanisms capable of coordinating diverse robots for collaborative assembly. To this end, we propose a Stackelberg game-theoretic learning approach. By leveraging Stackelberg games, we characterize robot collaboration through leader-follower interaction to enhance strategy seeking and ensure task completion. To enhance applicability across tasks, we introduce a novel multi-agent learning algorithm: Stackelberg double deep Q-learning, which facilitates automated assembly strategy seeking and multi-robot coordination. Our approach is validated through simulated assembly tasks. Comparison with three alternative multi-agent learning methods shows that our approach achieves the shortest task completion time for tasks. Furthermore, our approach exhibits robustness against both accidental and deliberate environmental perturbations.
Concept for a CMOS Image Sensor Suited for Analog Image Pre-Processing
Feb 26, 2015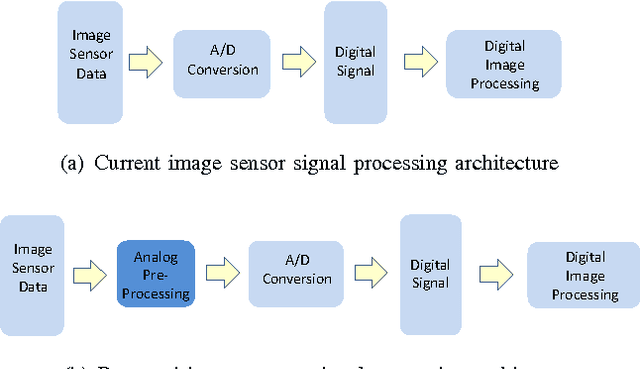
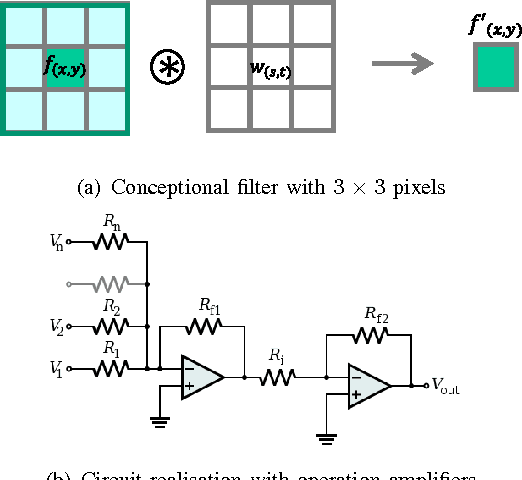
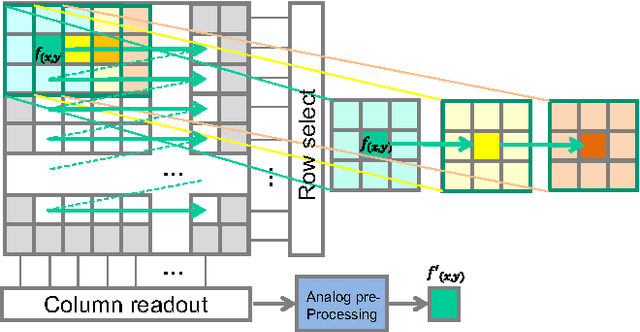
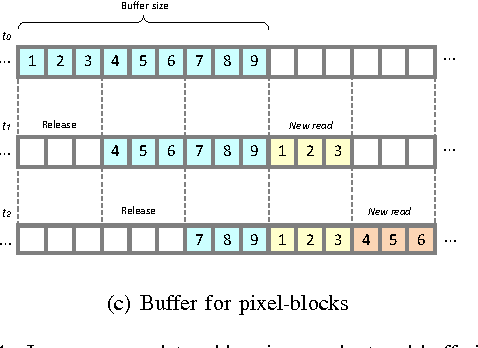
A concept for a novel CMOS image sensor suited for analog image pre-processing is presented in this paper. As an example, an image restoration algorithm for reducing image noise is applied as image pre-processing in the analog domain. To supply low-latency data input for analog image preprocessing, the proposed concept for a CMOS image sensor offers a new sensor signal acquisition method in 2D. In comparison to image pre-processing in the digital domain, the proposed analog image pre-processing promises an improved image quality. Furthermore, the image noise at the stage of analog sensor signal acquisition can be used to select the most effective restoration algorithm applied to the analog circuit due to image processing prior to the A/D converter.