 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Passivity-based Nonlinear Admittance Control with Application to Powered Upper-limb Control under Unknown Environmental Interactions
Apr 18, 2019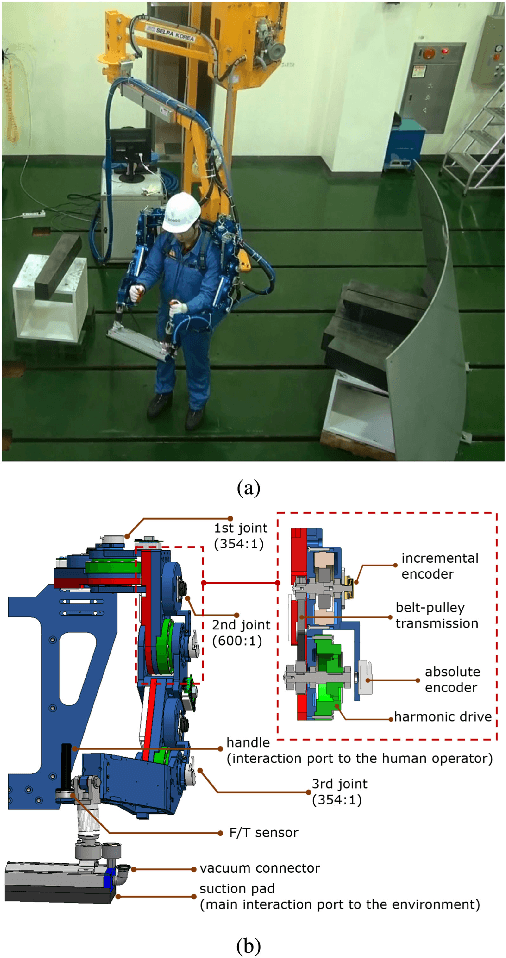
This paper presents an admittance controller based on the passivity theory for a powered upper-limb exoskeleton robot which is governed by the nonlinear equation of motion. Passivity allows us to include a human operator and environmental interaction in the control loop. The robot interacts with the human operator via F/T sensor and interacts with the environment mainly via end-effectors. Although the environmental interaction cannot be detected by any sensors (hence unknown), passivity allows us to have natural interaction. An analysis shows that the behavior of the actual system mimics that of a nominal model as the control gain goes to infinity, which implies that the proposed approach is an admittance controller. However, because the control gain cannot grow infinitely in practice, the performance limitation according to the achievable control gain is also analyzed. The result of this analysis indicates that the performance in the sense of infinite norm increases linearly with the control gain. In the experiments, the proposed properties were verified using 1 degree-of-freedom testbench, and an actual powered upper-limb exoskeleton was used to lift and maneuver the unknown payload.