 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOcean Plume Tracking with Unmanned Surface Vessels: Algorithms and Experiments
Apr 23, 2018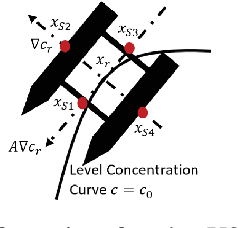
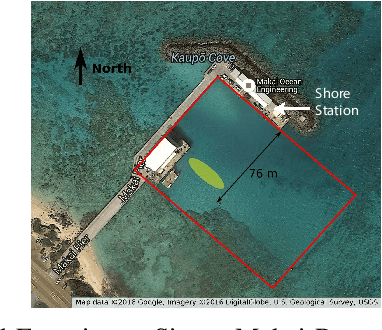
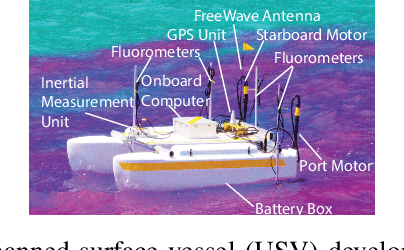
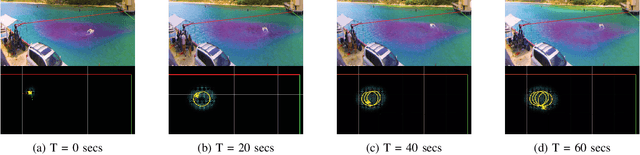
Pollution plume monitoring using autonomous vehicles is important due to the adverse effect of pollution plumes on the environment and associated monetary losses. Using the advection-diffusion plume dispersion model, we present a control law design to track dynamic concentration level curves. We also present a gradient and divergence estimation method to enable this control law from concentration measurement only. We then present the field testing results of the control law to track concentration level curves in a plume generated using Rhodamine dye as a pollution surrogate in a near-shore marine environment. These plumes are then autonomously tracked using an unmanned surface vessel equipped with fluorometer sensors. Field experimental results are shown to evaluate the performance of the controller, and complexities of field experiments in real-world marine environments are discussed in the paper.