 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge-Augmented Dexterous Grasping with Incomplete Sensing
Nov 17, 2020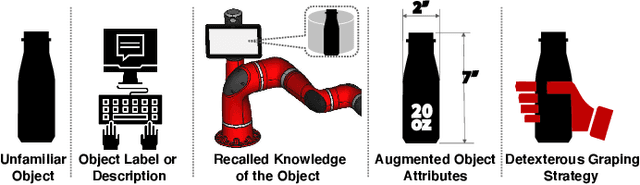
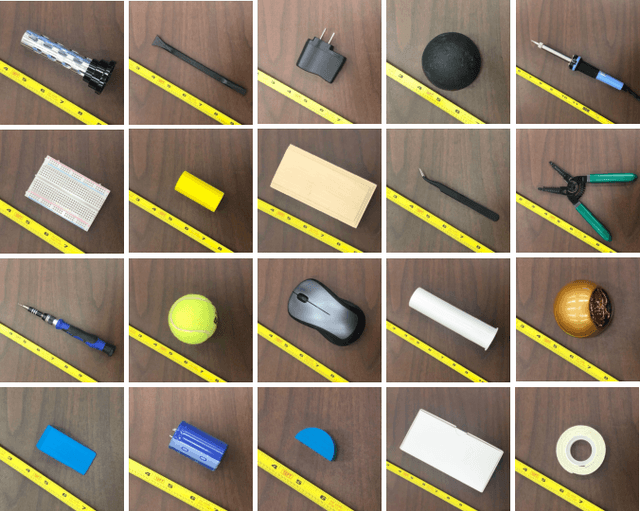
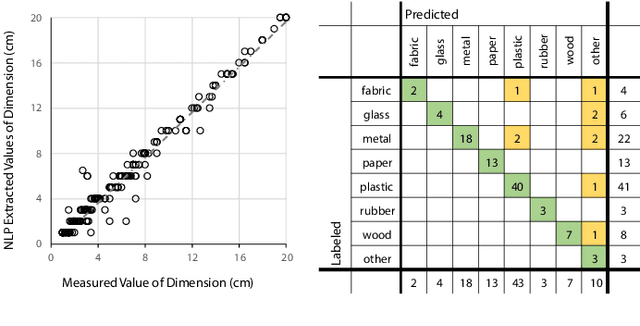
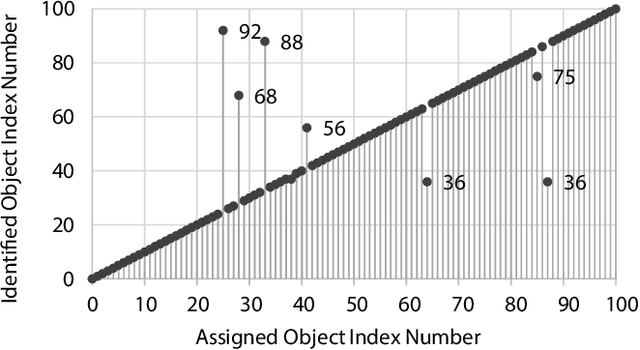
Humans can determine a proper strategy to grasp an object according to the measured physical attributes or the prior knowledge of the object. This paper proposes an approach to determining the strategy of dexterous grasping by using an anthropomorphic robotic hand simply based on a label or a description of an object. Object attributes are parsed from natural-language descriptions and augmented with an object knowledge base that is scraped from retailer websites. A novel metric named joint probability distance is defined to measure distance between object attributes. The probability distribution of grasp types for the given object is learned using a deep neural network which takes in object features as input. The action of the multi-fingered hand with redundant degrees of freedom (DoF) is controlled by a linear inverse-kinematics model of grasp topology and scales. The grasping strategy generated by the proposed approach is evaluated both by simulation and execution on a Sawyer robot with an AR10 robotic hand.
A Three-Stage Algorithm for the Large Scale Dynamic Vehicle Routing Problem with an Industry 4.0 Approach
Oct 04, 2020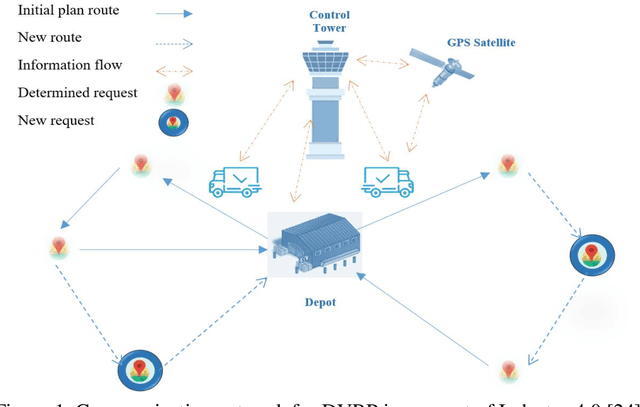

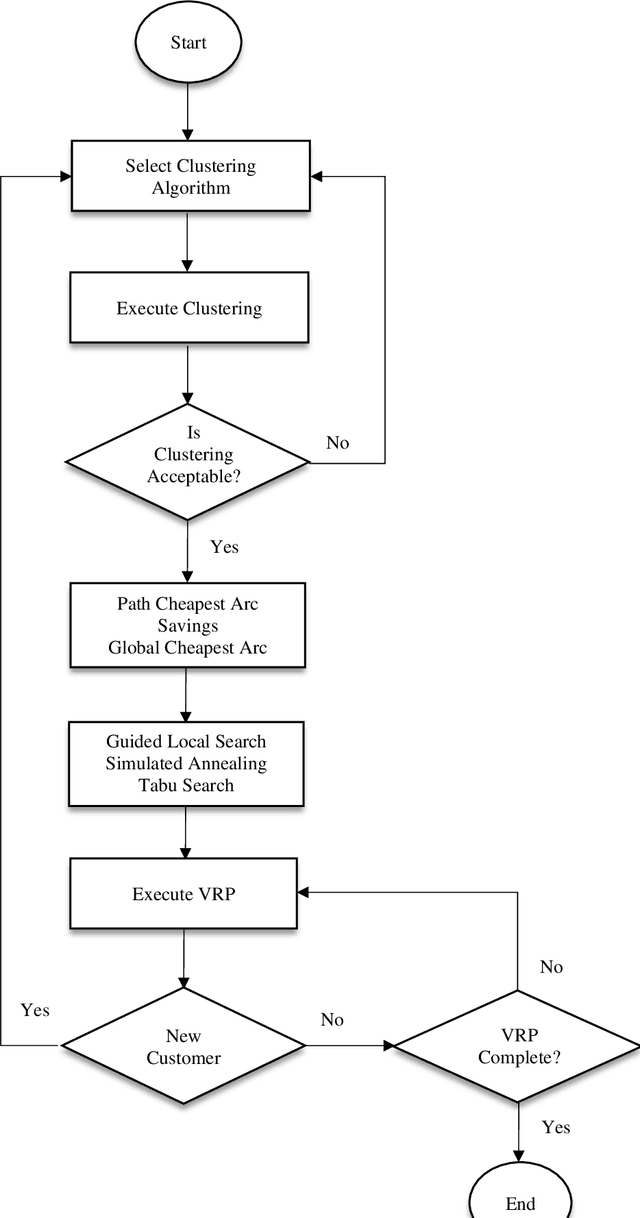
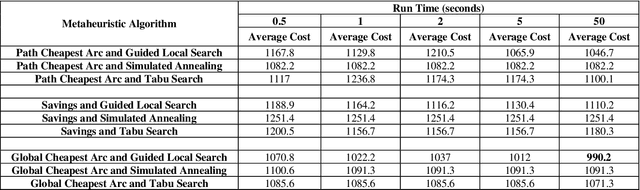
Industry 4.0 is a concept which helps companies to have a smart supply chain system when they are faced with a dynamic process. As Industry 4.0 focuses on mobility and real-time integration, it is a good framework for a Dynamic Vehicle Routing problem (DVRP). The main objective of this research is to solve the DVRP on a large-scale size. The aim of this study is to show that the delivery vehicles must serve customer demands from a common depot to have a minimum transit cost without exceeding the capacity constraint of each vehicle. In VRP, to reach an exact solution is quite difficult, and in large-size real world problems it is often impossible. Also, the computational time complexity of this type of problem grows exponentially. In order to find optimal answers for this problem in medium and large dimensions, using a heuristic approach is recommended as the best approach. A hierarchical approach consisting of three stages as cluster-first, route-construction second, route-improvement third is proposed. In the first stage, customers are clustered based on the number of vehicles with different clustering algorithms (i.e., K-mean, GMM, and BIRCH algorithms). In the second stage, the DVRP is solved using construction algorithms and in the third stage improvement algorithms are applied. The second stage is solved using construction algorithms (i.e. Savings algorithm, path cheapest arc algorithm, etc.). In the third stage, improvement algorithms such as Guided Local Search, Simulated Annealing and Tabu Search are applied. One of the main contributions of this paper is that the proposed approach can deal with large-size real world problems to decrease the computational time complexity. The results of this approach confirmed that the proposed methodology is applicable.
A Two-Stage Metaheuristic Algorithm for the Dynamic Vehicle Routing Problem in Industry 4.0 approach
Aug 26, 2020Industry 4.0 is a concept that assists companies in developing a modern supply chain (MSC) system when they are faced with a dynamic process. Because Industry 4.0 focuses on mobility and real-time integration, it is a good framework for a dynamic vehicle routing problem (DVRP). This research works on DVRP. The aim of this research is to minimize transportation cost without exceeding the capacity constraint of each vehicle while serving customer demands from a common depot. Meanwhile, new orders arrive at a specific time into the system while the vehicles are executing the delivery of existing orders. This paper presents a two-stage hybrid algorithm for solving the DVRP. In the first stage, construction algorithms are applied to develop the initial route. In the second stage, improvement algorithms are applied. Experimental results were designed for different sizes of problems. Analysis results show the effectiveness of the proposed algorithm.