 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning for Weapons to Targets Assignment in a Hypersonic strike
Oct 27, 2023We use deep reinforcement learning (RL) to optimize a weapons to target assignment (WTA) policy for multi-vehicle hypersonic strike against multiple targets. The objective is to maximize the total value of destroyed targets in each episode. Each randomly generated episode varies the number and initial conditions of the hypersonic strike weapons (HSW) and targets, the value distribution of the targets, and the probability of a HSW being intercepted. We compare the performance of this WTA policy to that of a benchmark WTA policy derived using non-linear integer programming (NLIP), and find that the RL WTA policy gives near optimal performance with a 1000X speedup in computation time, allowing real time operation that facilitates autonomous decision making in the mission end game.
Adaptive Approach Phase Guidance for a Hypersonic Glider via Reinforcement Meta Learning
Jul 30, 2021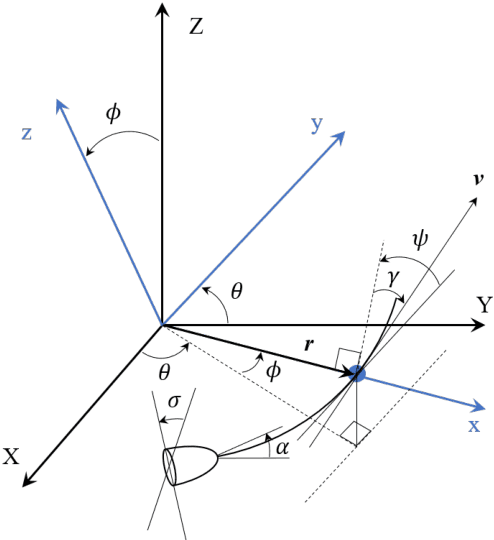
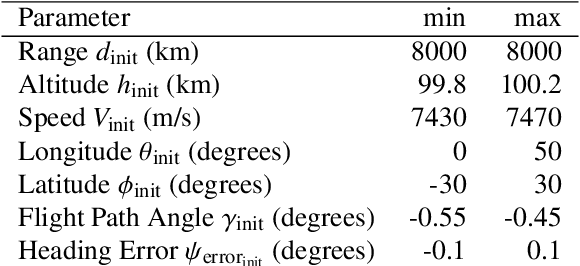
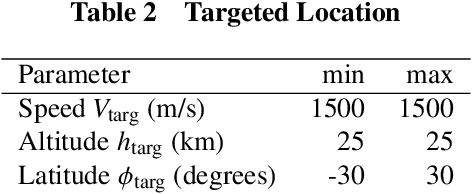
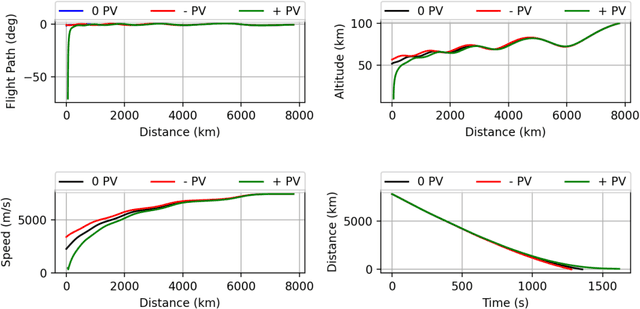
We use Reinforcement Meta Learning to optimize an adaptive guidance system suitable for the approach phase of a gliding hypersonic vehicle. Adaptability is achieved by optimizing over a range of off-nominal flight conditions including perturbation of aerodynamic coefficient parameters, actuator failure scenarios, and sensor noise. The system maps observations directly to commanded bank angle and angle of attack rates. These observations include a velocity field tracking error formulated using parallel navigation, but adapted to work over long trajectories where the Earth's curvature must be taken into account. Minimizing the tracking error keeps the curved space line of sight to the target location aligned with the vehicle's velocity vector. The optimized guidance system will then induce trajectories that bring the vehicle to the target location with a high degree of accuracy at the designated terminal speed, while satisfying heating rate, load, and dynamic pressure constraints. We demonstrate the adaptability of the guidance system by testing over flight conditions that were not experienced during optimization. The guidance system's performance is then compared to that of a linear quadratic regulator tracking an optimal trajectory.