 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Feature Learning and Object Recognition Framework for Underwater Fish Images
Mar 05, 2016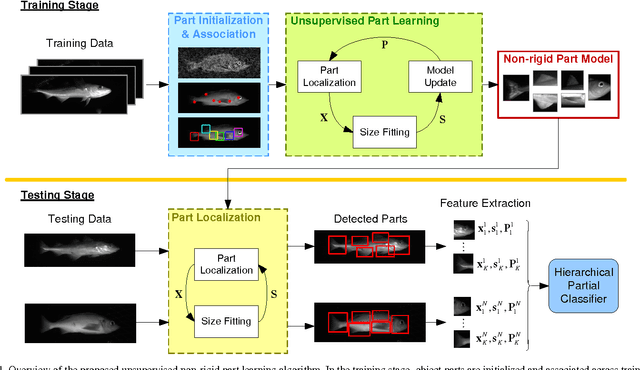
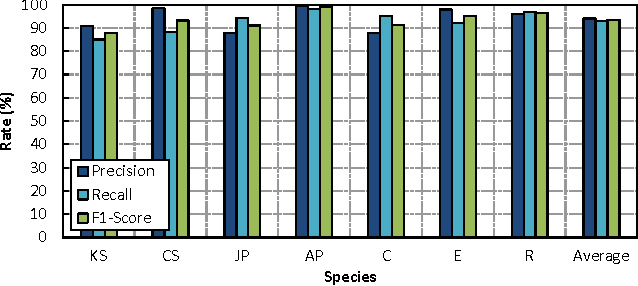
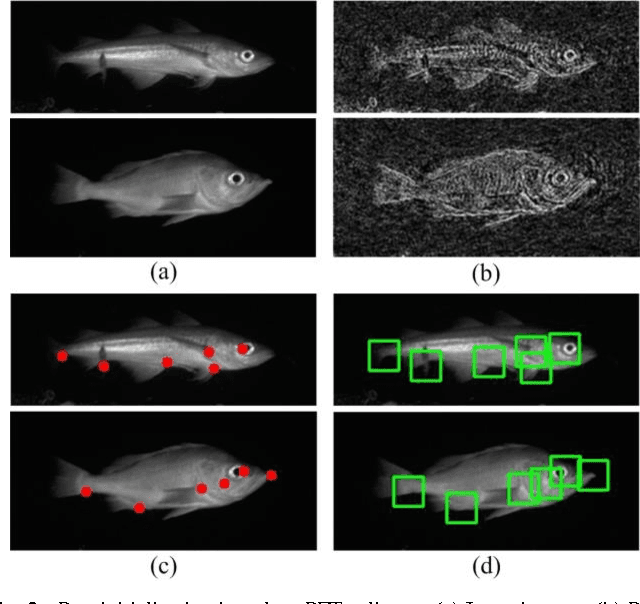
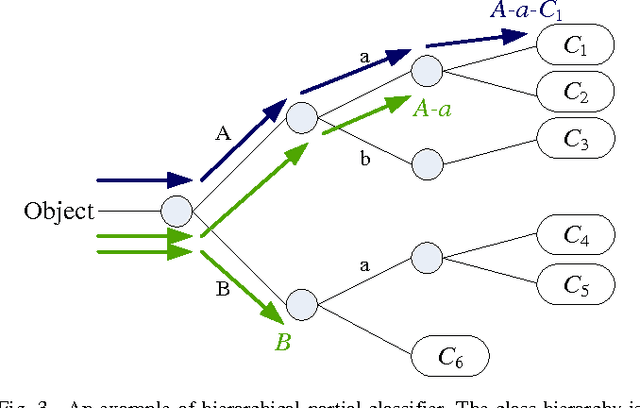
Live fish recognition is one of the most crucial elements of fisheries survey applications where vast amount of data are rapidly acquired. Different from general scenarios, challenges to underwater image recognition are posted by poor image quality, uncontrolled objects and environment, as well as difficulty in acquiring representative samples. Also, most existing feature extraction techniques are hindered from automation due to involving human supervision. Toward this end, we propose an underwater fish recognition framework that consists of a fully unsupervised feature learning technique and an error-resilient classifier. Object parts are initialized based on saliency and relaxation labeling to match object parts correctly. A non-rigid part model is then learned based on fitness, separation and discrimination criteria. For the classifier, an unsupervised clustering approach generates a binary class hierarchy, where each node is a classifier. To exploit information from ambiguous images, the notion of partial classification is introduced to assign coarse labels by optimizing the "benefit" of indecision made by the classifier. Experiments show that the proposed framework achieves high accuracy on both public and self-collected underwater fish images with high uncertainty and class imbalance.
Underwater Fish Tracking for Moving Cameras based on Deformable Multiple Kernels
Mar 05, 2016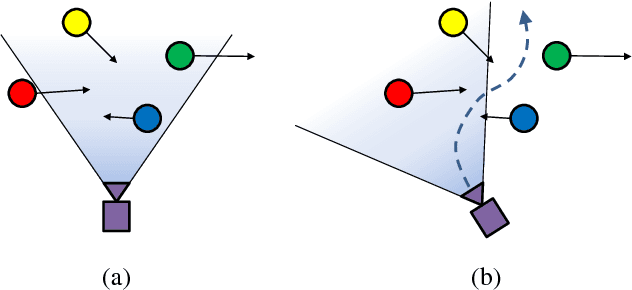
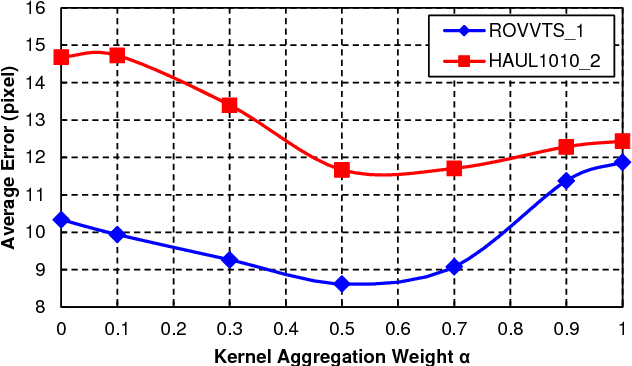
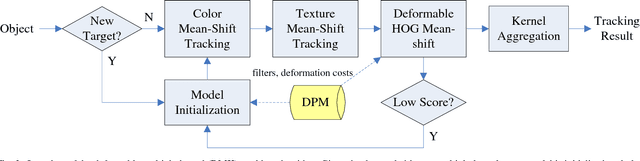
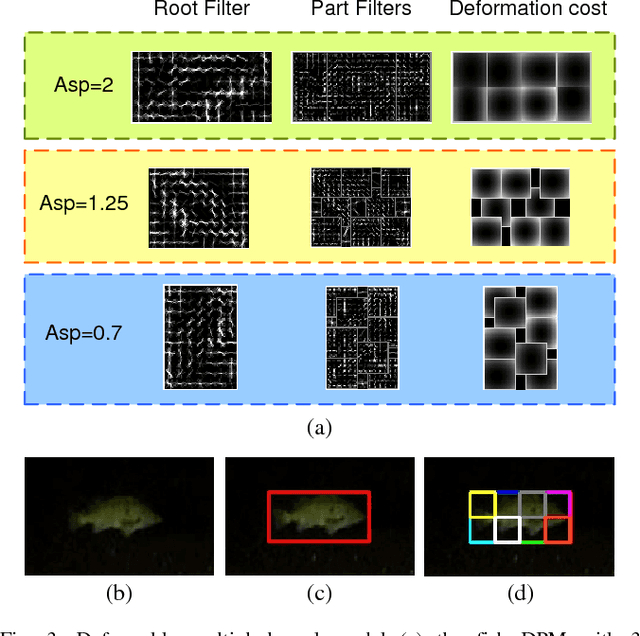
Fishery surveys that call for the use of single or multiple underwater cameras have been an emerging technology as a non-extractive mean to estimate the abundance of fish stocks. Tracking live fish in an open aquatic environment posts challenges that are different from general pedestrian or vehicle tracking in surveillance applications. In many rough habitats fish are monitored by cameras installed on moving platforms, where tracking is even more challenging due to inapplicability of background models. In this paper, a novel tracking algorithm based on the deformable multiple kernels (DMK) is proposed to address these challenges. Inspired by the deformable part model (DPM) technique, a set of kernels is defined to represent the holistic object and several parts that are arranged in a deformable configuration. Color histogram, texture histogram and the histogram of oriented gradients (HOG) are extracted and serve as object features. Kernel motion is efficiently estimated by the mean-shift algorithm on color and texture features to realize tracking. Furthermore, the HOG-feature deformation costs are adopted as soft constraints on kernel positions to maintain the part configuration. Experimental results on practical video set from underwater moving cameras show the reliable performance of the proposed method with much less computational cost comparing with state-of-the-art techniques.
Tracking Live Fish from Low-Contrast and Low-Frame-Rate Stereo Videos
Apr 15, 2015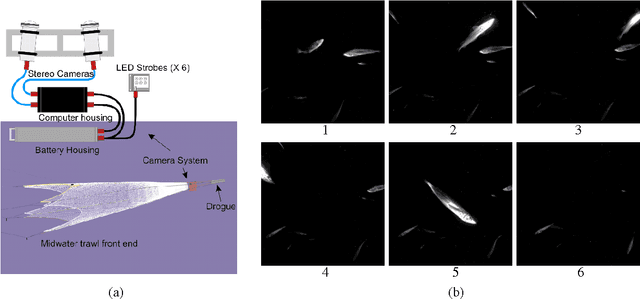
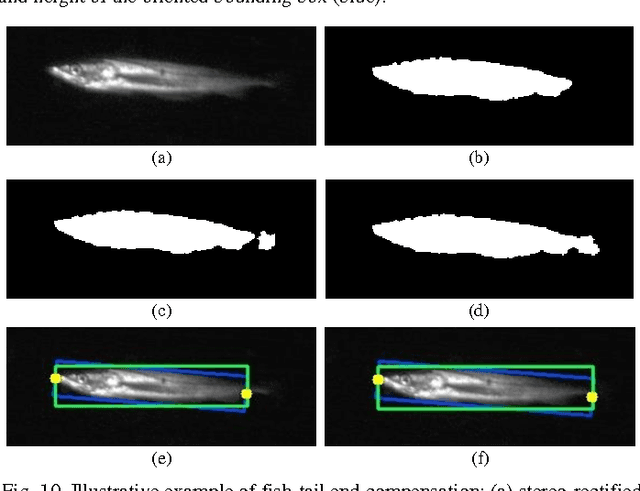
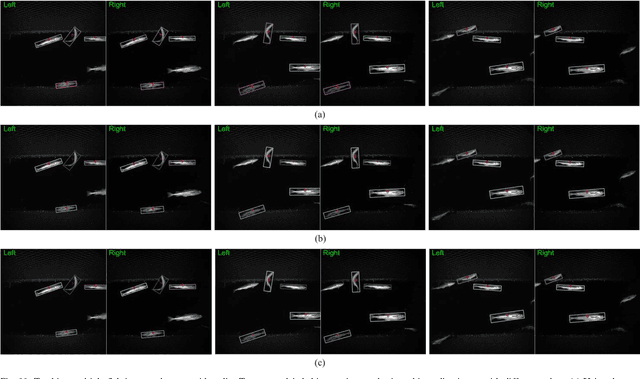
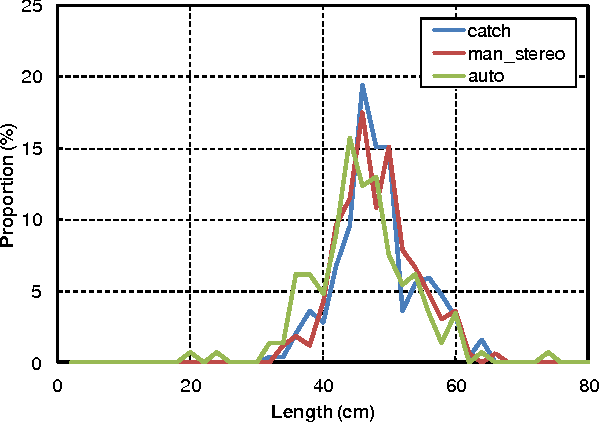
Non-extractive fish abundance estimation with the aid of visual analysis has drawn increasing attention. Unstable illumination, ubiquitous noise and low frame rate video capturing in the underwater environment, however, make conventional tracking methods unreliable. In this paper, we present a multiple fish tracking system for low-contrast and low-frame-rate stereo videos with the use of a trawl-based underwater camera system. An automatic fish segmentation algorithm overcomes the low-contrast issues by adopting a histogram backprojection approach on double local-thresholded images to ensure an accurate segmentation on the fish shape boundaries. Built upon a reliable feature-based object matching method, a multiple-target tracking algorithm via a modified Viterbi data association is proposed to overcome the poor motion continuity and frequent entrance/exit of fish targets under low-frame-rate scenarios. In addition, a computationally efficient block-matching approach performs successful stereo matching, which enables an automatic fish-body tail compensation to greatly reduce segmentation error and allows for an accurate fish length measurement. Experimental results show that an effective and reliable tracking performance for multiple live fish with underwater stereo cameras is achieved.
* 14 pages, 14 figures, 6 tables