 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTracking Live Fish from Low-Contrast and Low-Frame-Rate Stereo Videos
Paper and Code
Apr 15, 2015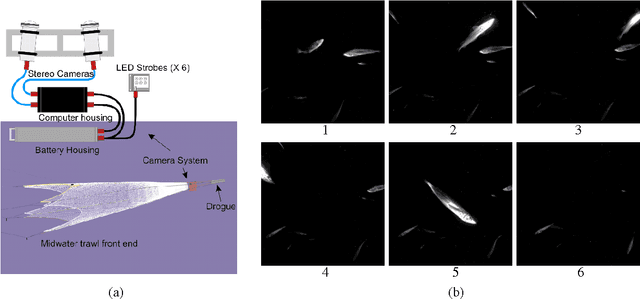
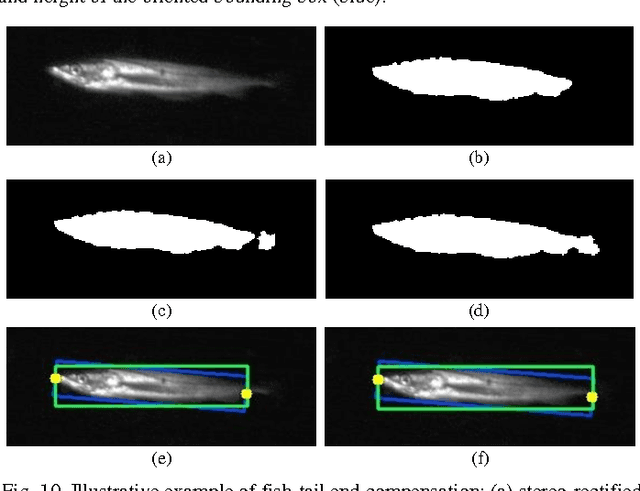
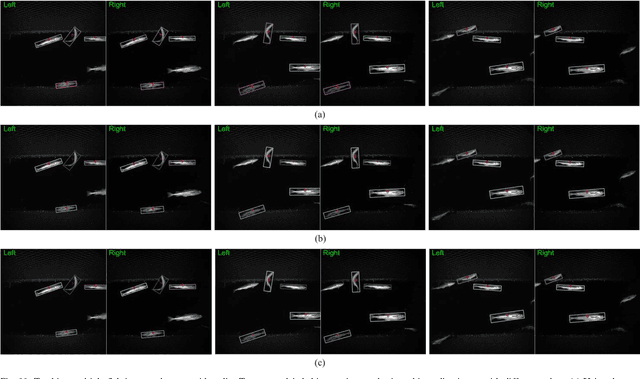
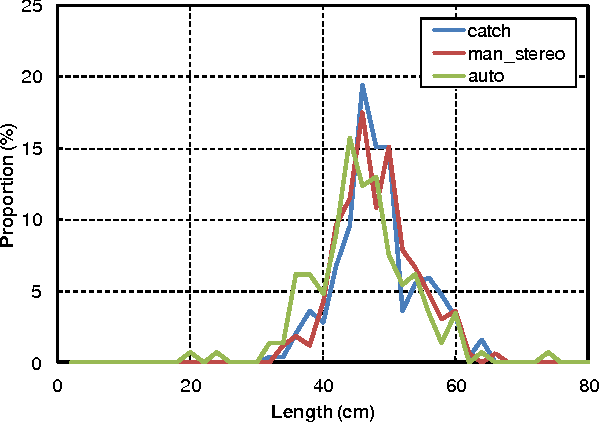
Non-extractive fish abundance estimation with the aid of visual analysis has drawn increasing attention. Unstable illumination, ubiquitous noise and low frame rate video capturing in the underwater environment, however, make conventional tracking methods unreliable. In this paper, we present a multiple fish tracking system for low-contrast and low-frame-rate stereo videos with the use of a trawl-based underwater camera system. An automatic fish segmentation algorithm overcomes the low-contrast issues by adopting a histogram backprojection approach on double local-thresholded images to ensure an accurate segmentation on the fish shape boundaries. Built upon a reliable feature-based object matching method, a multiple-target tracking algorithm via a modified Viterbi data association is proposed to overcome the poor motion continuity and frequent entrance/exit of fish targets under low-frame-rate scenarios. In addition, a computationally efficient block-matching approach performs successful stereo matching, which enables an automatic fish-body tail compensation to greatly reduce segmentation error and allows for an accurate fish length measurement. Experimental results show that an effective and reliable tracking performance for multiple live fish with underwater stereo cameras is achieved.