 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Prediction of Ship Maneuvering Motion using Ensemble Learning with Feedforward Neural Networks
Nov 30, 2024



In the field of Maritime Autonomous Surface Ships (MASS), the accurate modeling of ship maneuvering motion for harbor maneuvers is a crucial technology. Non-parametric system identification (SI) methods, which do not require prior knowledge of the target ship, have the potential to produce accurate maneuvering models using observed data. However, the modeling accuracy significantly depends on the distribution of the available data. To address these issues, we propose a probabilistic prediction method of maneuvering motion that incorporates ensemble learning into a non-parametric SI using feedforward neural networks. This approach captures the epistemic uncertainty caused by insufficient or unevenly distributed data. In this paper, we show the prediction accuracy and uncertainty prediction results for various unknown scenarios, including port navigation, zigzag, turning, and random control maneuvers, assuming that only port navigation data is available. Furthermore, this paper demonstrates the utility of the proposed method as a maneuvering simulator for assessing heading-keeping PD control. As a result, it was confirmed that the proposed method can achieve high accuracy if training data with similar state distributions is provided, and that it can also predict high uncertainty for states that deviate from the training data distribution. In the performance evaluation of PD control, it was confirmed that considering worst-case scenarios reduces the possibility of overestimating performance compared to the true system. Finally, we show the results of applying the proposed method to full-scale ship data, demonstrating its applicability to full-scale ships.
Conceptual Design on the Field of View of Celestial Navigation Systems for Maritime Autonomous Surface Ships
Aug 28, 2024
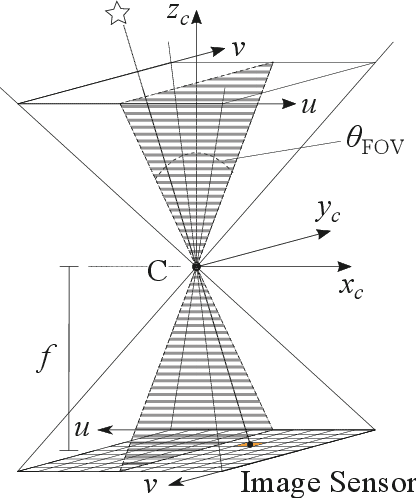
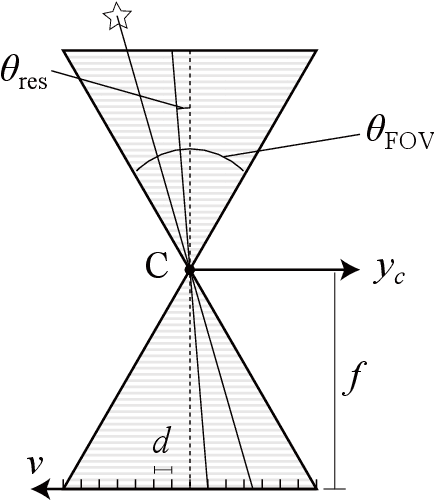
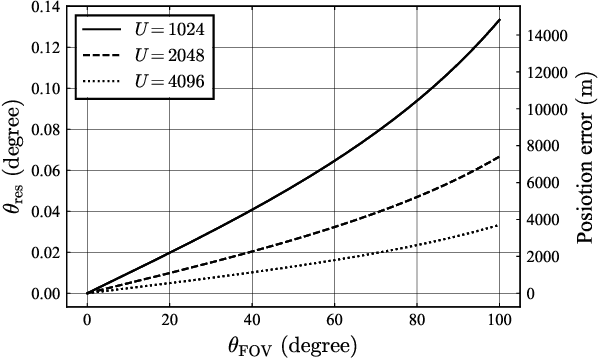
In order to understand the appropriate field of view (FOV) size of celestial automatic navigation systems for surface ships, we investigate the variations of measurement accuracy of star position and probability of successful star identification with respect to FOV, focusing on the decreasing number of observable star magnitudes and the presence of physically covered stars in marine environments. The results revealed that, although a larger FOV reduces the measurement accuracy of star positions, it increases the number of observable objects and thus improves the probability of star identification using subgraph isomorphism-based methods. It was also found that, although at least four objects need to be observed for accurate identification, four objects may not be sufficient for wider FOVs. On the other hand, from the point of view of celestial navigation systems, a decrease in the measurement accuracy leads to a decrease in positioning accuracy. Therefore, it was found that maximizing the FOV is required for celestial automatic navigation systems as long as the desired positioning accuracy can be ensured. Furthermore, it was found that algorithms incorporating more than four observed celestial objects are required to achieve highly accurate star identification over a wider FOV.
Parameter fine-tuning method for MMG model using real-scale ship data
Dec 07, 2023In this paper, a fine-tuning method of the parameters in the MMG model for the real-scale ship is proposed. In the proposed method, all of the arbitrarily indicated target parameters of the MMG model are tuned simultaneously in the framework of SI using time series data of real-sale ship maneuvering motion data to steadily improve the accuracy of the MMG model. Parameter tuning is formulated as a minimization problem of the deviation of the maneuvering motion simulated with given parameters and the real-scale ship trials, and the global solution is explored using CMA-ES. By constraining the exploration ranges to the neighborhood of the previously determined parameter values, the proposed method limits the output in a realistic range. The proposed method is applied to the tuning of 12 parameters for a container ship with five different widths of the exploration range. The results show that, in all cases, the accuracy of the maneuvering simulation is improved by applying the tuned parameters to the MMG model, and the validity of the proposed parameter fine-tuning method is confirmed.
Collision probability reduction method for tracking control in automatic docking / berthing using reinforcement learning
Dec 14, 2022Automation of berthing maneuvers in shipping is a pressing issue as the berthing maneuver is one of the most stressful tasks seafarers undertake. Berthing control problems are often tackled via tracking a predefined trajectory or path. Maintaining a tracking error of zero under an uncertain environment is impossible; the tracking controller is nonetheless required to bring vessels close to desired berths. The tracking controller must prioritize the avoidance of tracking errors that may cause collisions with obstacles. This paper proposes a training method based on reinforcement learning for a trajectory tracking controller that reduces the probability of collisions with static obstacles. Via numerical simulations, we show that the proposed method reduces the probability of collisions during berthing maneuvers. Furthermore, this paper shows the tracking performance in a model experiment.